![]()
最新記事公開時にプッシュ通知します
![]()
指1本でモノを浮かし移動させる技術 英UCLなど超音波浮遊「TipTrap」開発【研究紹介】
2022年11月11日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
英University College LondonとスペインのUniversidad Publica de Navarra、英Ultraleap社の研究チームが発表した論文「TipTrap: A Co-located Direct Manipulation Technique for Acoustically Levitated Content.」は、指先のすぐ下でビーズを浮かして移動させることができる超音波浮遊技術を提案した研究報告だ。指先の音の反射を利用して、浮遊コンテンツの制御を可能にする。

研究課題
音響浮遊は、インタラクティブな空中ディスプレイを実現するためのアプローチとして、ここ数年急速に発展している。複数個のトランスデューサー(振動子)を搭載した空中超音波フェーズドアレイを用いて振動子を個別にプログラムし、それぞれを1点に集める集束超音波で空中超音波場を生成する。集束した点にビーズなどの軽い粒子素材を置くと浮遊するという仕組みである。
これにより、ユーザーにどの視点からでも目の前にある浮遊コンテンツをなんの障壁もなく裸眼で知覚させることができる。固体だけでなく、液体(水滴)の浮遊も可能である。
さらに振動子の個別プログラムによって、集束超音波の位置を自在に変えられるため、浮遊コンテンツを空中で3次元的にコントロールできる。これによって、空中を移動しているように見る者に知覚させることができる。浮遊コンテンツの複数同時制御も可能だ。
浮遊コンテンツは、大きく重い物体の浮遊に成功している事例もあるが、自在に制御できるのは基本的に軽い粒子素材に留まっているのが現状だ。そのため、多様な表現をする場合、ビーズに糸や布を着けて、複数同時に浮遊させ大きく見せる方法が主流である。
最近では、ロボットアームのエンドエフェクタ(先端)に空中超音波フェーズドアレイを2台取り付け、素材や接着剤を浮遊させた状態で非接触で工作するアプローチも提案されている。
ご参考:材料を「空中に浮かせながら」工作するロボット、部品や接着剤の液を音で浮遊させ、接触なしで組み立て可能
研究内容
浮遊コンテンツをリアルタイムに操作するための研究では、指を追跡しその方向に移動させる手法が成功している。しかし、これらの制御は、全て浮遊コンテンツ周辺の空中超音波場に物理的に侵入することなく、外部から操作して浮遊コンテンツを制御しているにすぎない。浮遊コンテンツに手を近づけると空中超音波場が乱れ浮遊コンテンツがユーザーの手の超音波反射で落下するためである。
今回の研究では、この課題をクリアするため、指を伸ばして浮遊コンテンツに近づけた状態でコントロールできる手法「TipTrap」を提案する。
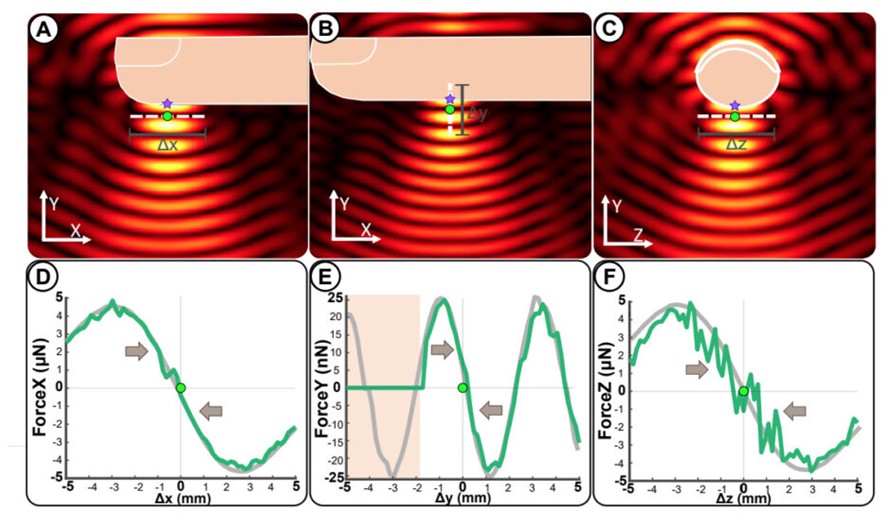
TipTrapは、空中超音波場に指先が侵入した際に、指先の表面に集束超音波をあえて反射させることによって、機能的な新たな空中超音波場を指先の下に生成させる。この生成は、指先を閉ループシステムで追跡し、指先の下に音を集束させる方法で実現している。
これによって、指先の近傍(約2.1 mm)にある粒子素材の選択と操作を、落下させることなく浮遊を可能にしている。指の下で浮かぶ浮遊コンテンツは、指が動くと同時に移動し、指先で操作しているように見る者に知覚させる。
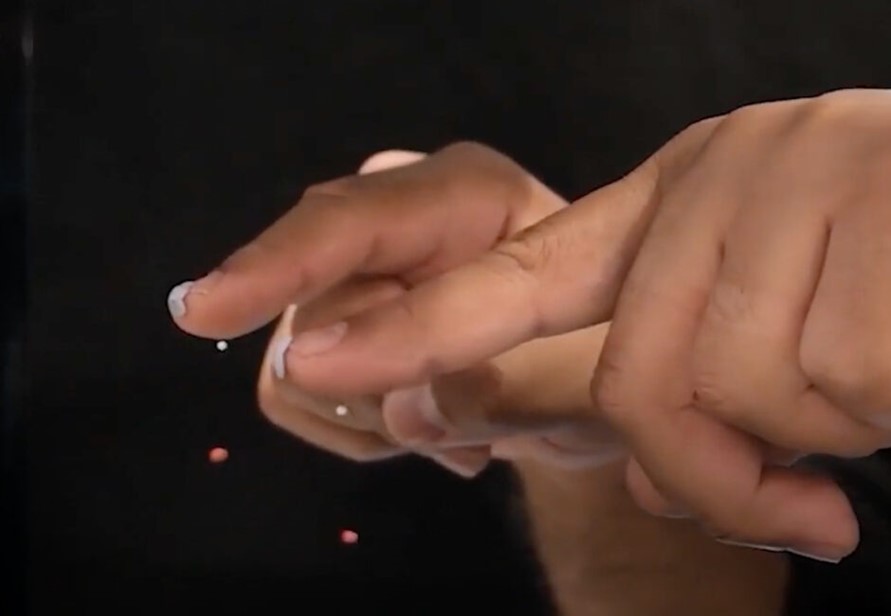
さらに親指の曲げ伸ばしで、選択・非選択のトリガーとするジェスチャー操作を可能にしている。親指を曲げると人差し指のすぐ下に浮遊コンテンツが留まり、伸ばすと離れるユーザインタフェースである。これによって、ユーザーは浮遊コンテンツの輸送が容易に行える。
評価
研究では、Finite-Diferences Time Domain(FDTD)シミュレーションを用いて指の反射がどのように空中超音波場に影響するかを調べ、これらの結果を踏まえてロボットハンドのセットアップによる性能の評価を行い、最後に実際の指で様々なタイプの浮遊コンテンツを操作するテストを行って有効性を実証した。
Source and Image Credits: Eimontas Jankauskis, Sonia Elizondo, Roberto Montano Murillo, Asier Marzo, and Diego Martinez Plasencia. 2022. TipTrap: A Co-located Direct Manipulation Technique for Acoustically Levitated Content. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology (UIST ’22). Association for Computing Machinery, New York, NY, USA, Article 60, 1–11. https://doi.org/10.1145/3526113.3545675
関連記事
青と黄を混ぜると「きちんと」緑色になるお絵かきデジタルツール 油絵や水彩画などのデジタル再現に活用【研究紹介】

音が聞ける「布」?! シャツが周囲の会話や体内の心拍音をマイクのように録音 MITなどが開発【研究紹介】

「コード」から「漫画」を自動作成するツール「CodeToon」。カナダの研究者らが開発【研究紹介】
人気記事

【3/26(木)オンライン開催!】Rust いまのアーキテクチャにどこから入れる? ~ yukiさん、kenkooooさんが部分導入の“最適解”を語る夜 ~

世界屈指の「ランサムウェアに金を払わない国」なはずの日本にサイバー攻撃が増えている理由【上原哲太郎&増田幸美】
「何の役に立つの?」と図形問題を避ける次女。学習モチベを上げた「算数のスキルツリー」整理