![]()
![]()
医療用ロボットの過去10年の研究成果 8つのホットトピックスから考察【研究紹介】
2021年12月22日

先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
Boston Children’s Hospital、ETH-Zürich、Vanderbilt University、University of Washington、Scuola Superiore Sant’Anna、Rice University、University of Leeds、上海交通大学による研究チームは論文「A decade retrospective of medical robotics research from 2010 to 2020」を発表した。これは、過去10年間(2010年-2020年)に焦点を当て、医療用ロボットの主要な成果を振り返って評価した報告書だ。この10年間の医療用ロボットのホットトピックスを取り上げ、簡潔にまとめている。
この報告書は医療用ロボットの定義として、主要なロボット研究誌や学会誌に掲載されるのに適した内容を意図している。医療用ロボットには、単一自由度・多自由度(DOF)の電動システムが含まれおり、その動作には、事前プログラム、ジョイスティックによる指示、自律動作、またはその複数の組み合わせがある。
- 過去10年の医療用ロボットに関するホットトピックス
- 過去10年の工学/医学系の医療用ロボットに関する論文数を見る
- ホットトピックス(1)ロボットによる腹腔鏡手術
- ホットトピックス(2)最小侵襲手術用の非腹腔鏡ロボット
- ホットトピックス(3)支援型ウェアラブルロボット
- ホットトピックス(4) 治療リハビリテーションロボット
- ホットトピックス(5)カプセルロボット
- ホットトピックス(6)医療用磁気アクチュエーター
- ホットトピックス(7)医療用ソフトロボティクス
- ホットトピックス(8)医療用連続体ロボティクス
- 最後に
過去10年の医療用ロボットに関するホットトピックス
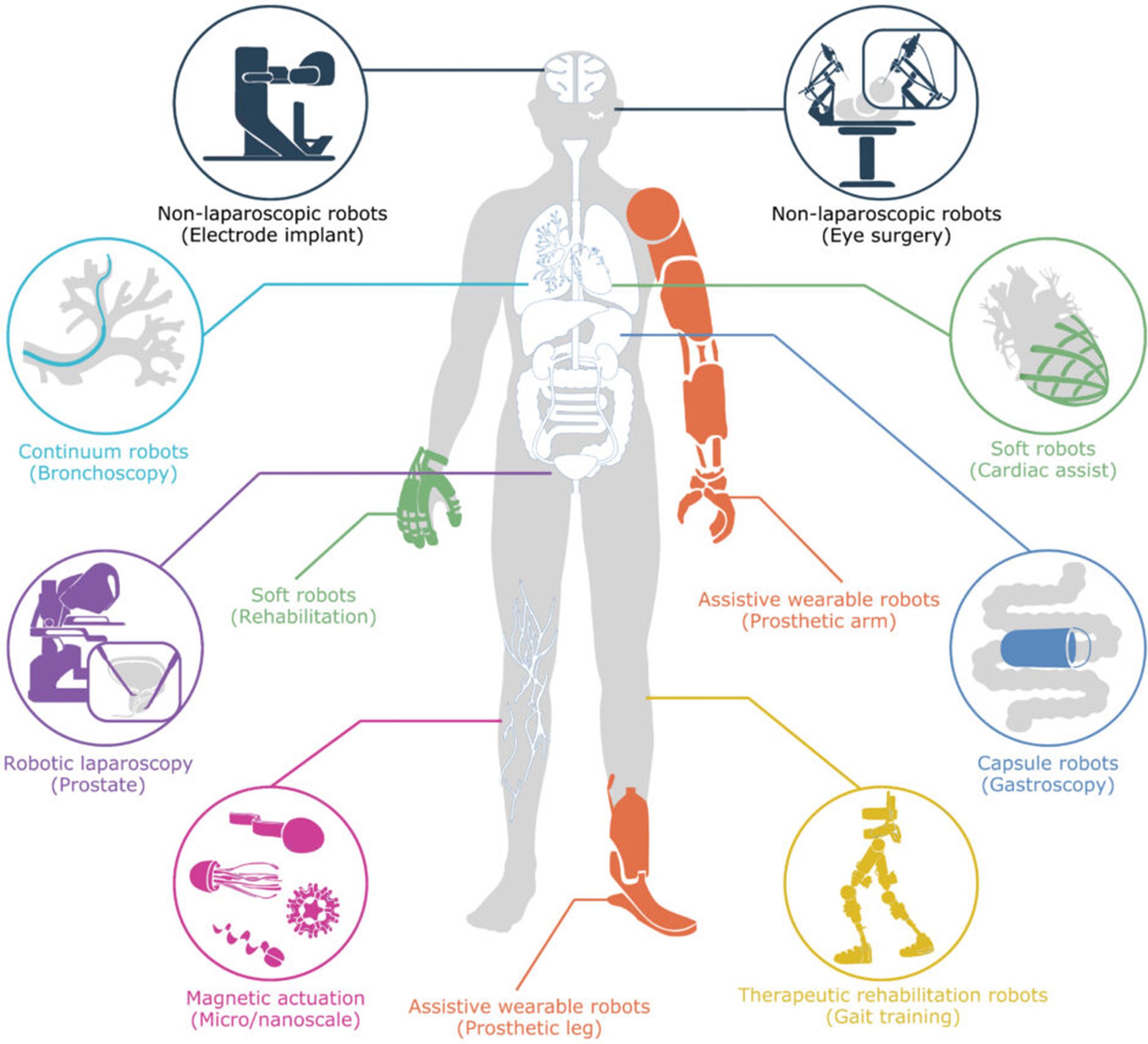
2010年から2020年に発表された医療用ロボットに関する論文のうち、最も引用度の高いものをオンライン学術データベース「Web of Science」で検索し、8つのホットトピックスを特定した。これらホットトピックスは、特定の臨床応用に関連するものと、医療に幅広く応用できる実現技術に関連するものである。
- 1. Robotic laparoscopy(ロボットによる腹腔鏡手術)
- 2. Nonlaparoscopic robots for minimally invasive surgery(最小侵襲手術用の非腹腔鏡ロボット)
- 3. Assistive wearable robots(支援型ウェアラブルロボット)
- 4. Therapeutic rehabilitation robots(治療リハビリテーションロボット)
- 5. Capsule robots(カプセルロボット)
- 6. Magnetic actuation(医療用磁気アクチュエーター)
- 7. Soft robotics(ソフトロボティクス)
- 8. Continuum robotics(医療用連続体ロボティクス)
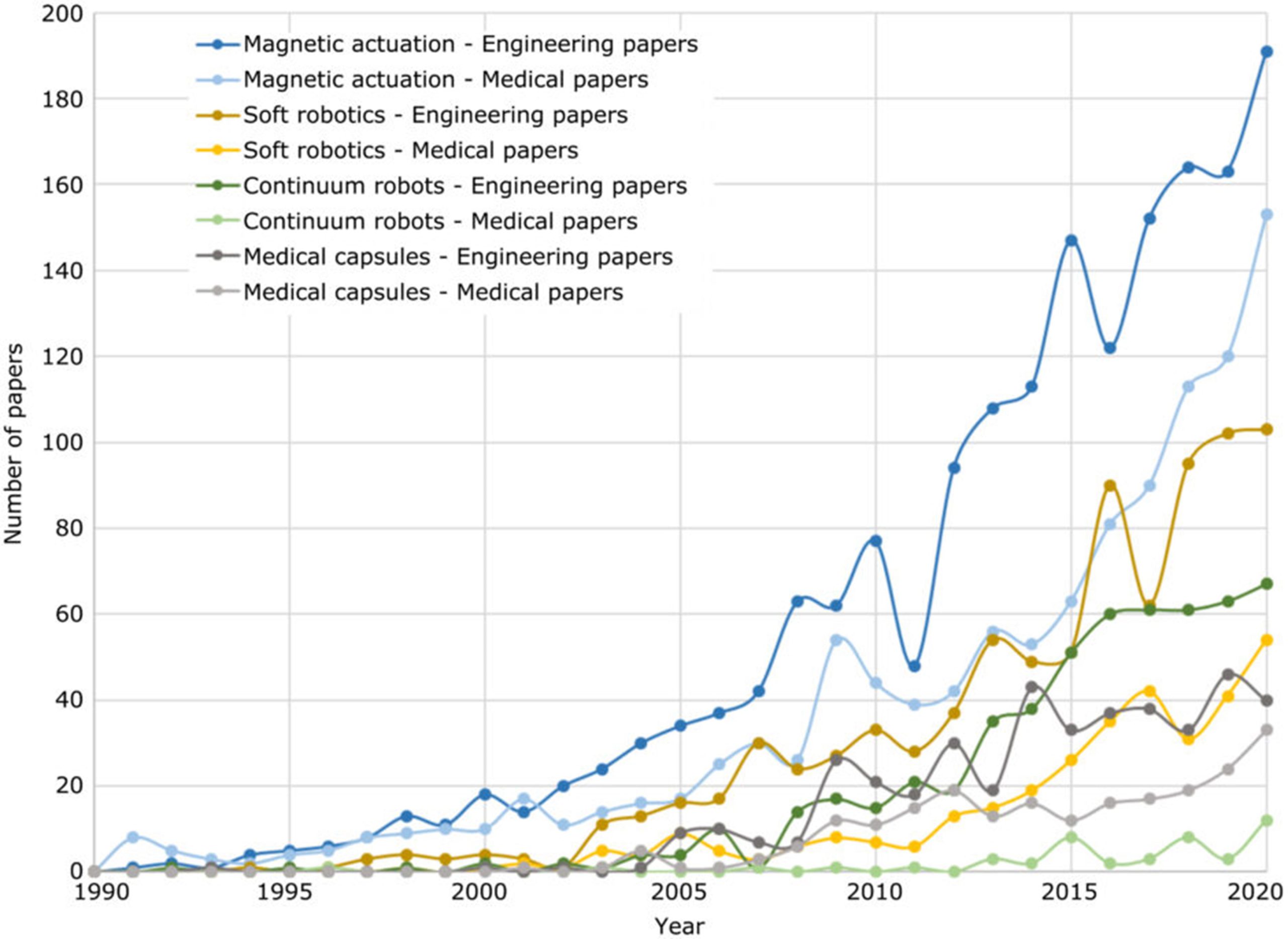
過去10年の工学/医学系の医療用ロボットに関する論文数を見る
工学・医学系ジャーナルに掲載された医療用ロボットに関する論文数は、1990年の6件から2020年には3500件以上と急激に増加。ホットトピックスに関する医学系論文の数は、工学系論文数の25%以下であった。これは、医学系論文には、工学的なアプローチの研究に比べ、コストと時間がかかる臨床試験の結果が多く含まれているためだと考えられる。
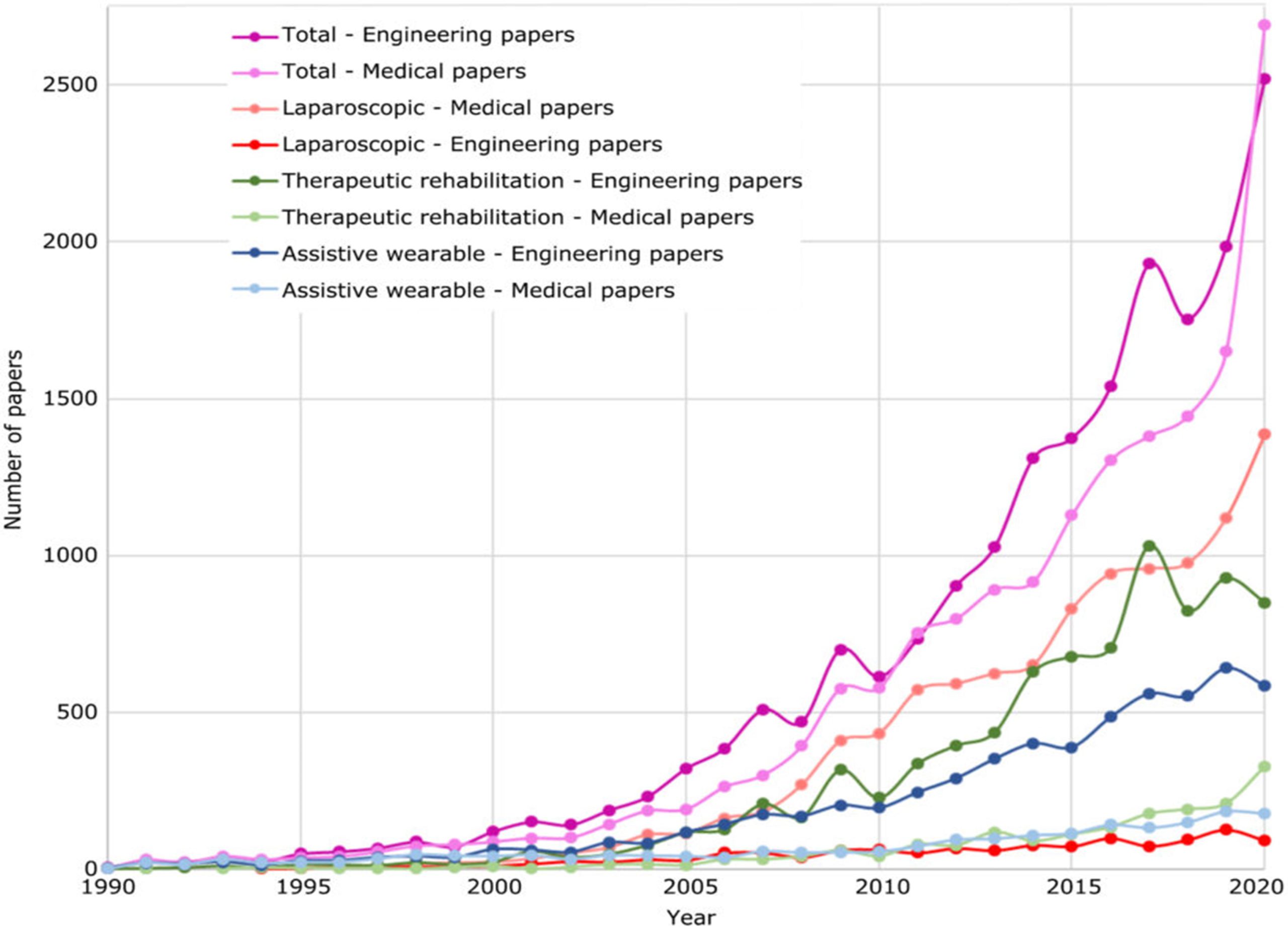
医学系論文のうち、腹腔鏡ロボットに関する論文が圧倒的に多く(全体の60~70%)、2020年には1300以上の論文が発表された。工学系論文は、治療用リハビリテーションと支援用ウェアラブルロボットの研究成果が中心になっている。この2つのホットトピックスは、過去10年間に発表された工学系ジャーナルの医療ロボット論文の約80%を占めている。
以下、8つのホットトピックスについて掘り下げていく。
ホットトピックス(1)ロボットによる腹腔鏡手術
腹腔鏡ロボットは、医療用ロボットの中でも最も成熟した分野の一つであり、商業的にも成功した分野だ。過去10年間で、臨床、商業、学術の3つの面で大きな進歩が見られた。腹腔鏡ロボットの研究の大部分は、臨床的なものが多く、さまざまな外科手術において、ロボットの効果を標準的な(通常は手動の)腹腔鏡技術と比較することを目的としている。例えば、根治的前立腺全摘除術、膀胱癌における膀胱全摘除術、直腸癌切除術、子宮摘出術など。
商業的には、この10年間、Intuitive Surgical社製のロボット「ダヴィンチ」が進化を遂げてきた。内視鏡や腹腔鏡の機器をどのアームにも装着できるようになり、アームや患者用カートの半自動化、機器のカップリングの改良など。過去10年間で、少なくとも50種類のダヴィンチ用器具が発売された。さらに、ダヴィンチの使用は急速に拡大しており、Intuitive Surgical社の年次報告書によると、2019年には120万件以上の手術が行われているという。
ホットトピックス(2)最小侵襲手術用の非腹腔鏡ロボット
このように今後も進化し続けるであろう腹腔鏡ロボットだが、その一方で、非腹腔鏡手術用の新しいロボットソリューションを模索している外科医やエンジニアもいる。主なカテゴリーには、腹腔鏡手術以外の細い管を使用した内視鏡ロボットが含まれる。
内視鏡ロボットの研究では、管腔内視鏡手術用の多関節内視鏡プラットフォームや、経鼻下垂体手術に使用される同心管ロボットなどが開発された。また、多関節のロボティックプローブを使って経口的にアクセスし、手動ツールを駆使して手術を行う方法も提案されてきた。
さらに、自然開口部を利用した最小侵襲バイオプシー(生体組織採取検査)に使われる操縦可能なカテーテルに焦点を当てたシステムもリリースされた。中でもIntuitive Surgical社の検査手術ロボット「Ion」やAuris Healthcare社の内視鏡ロボット「Monarch Platform」が最も注目されているのは。これらは、カテーテルを器用に動かすことで、通常では安全に行うことが困難な末梢の肺生検を可能にする。
ホットトピックス(3)支援型ウェアラブルロボット
支援型ウェアラブルロボットとは、筋骨格や神経筋に障害のある人の移動性や機能性を向上させることを目的とした「着る」ロボットのことを指す。発表された研究成果は、主にウェアラブルロボットの設計と制御にまつわるものになる。この分野では、上肢や下肢が切断された人のためのロボット義足や、脊髄損傷、脳性麻痺、脳卒中、多発性硬化症などの神経筋障害を持つ人のための外骨格の開発が進められている。今回は3つの主要なカテゴリー(電動下腿義足、神経制御の上腕義手、外骨格型下肢装置)が取り上げられている。
下腿義足の分野では、2010年頃までは外部エネルギーが必要なパッシブデバイスが主流だったが、この10年で義足の膝や足首の関節に電力が導入された。電力を持ったデバイスには自発性があるため、人間とデバイスの協調を確保するための新しい制御方法が必要となり、いくつかの手法も提案されてきた。
下肢用の機器とは異なり、以前から上肢用の義手は電動式だった。その上に、この10年間で多関節義手が登場し、多関節・多DOFのハンドやアームに対応した制御方法が開発されてきた。
このような制御方法には、筋電図(EMG)を用いたパターン認識アプローチが多く見られた。またこの10年間で、多関節義手の運動制御に埋め込み型電極を使用したり、義手に対応する有意義なを利用者に提供したりすることが可能になった。
さらに、2010年からの10年間で、下肢外骨格の分野における学術的な研究開発も著しく進展してきた。ユーザーの意図を把握する方法としては、慣性計測ユニット(IMU)で計測した身体の姿勢を用いり、歩行(または活動)の意図を推測する方法が広く普及した。一方で、歩行能力のあるユーザーを補助する最善の方法はまだ確立できていない。それは歩行可能なユーザーを支援する場合、機器と人間の高度な関節レベルの協調が必要とされているためだ。この分野では今後も引き続き最適なバランスが探究されていくだろう。
ホットトピックス(4) 治療リハビリテーションロボット
外骨格や義肢は失われた機能を補うことを目的としているが、リハビリテーションロボットは、脳卒中や脊髄損傷などの神経系損傷を受けた手足に反復運動療法を施し、個人の能力を回復させることを目的としている。リハビリテーションロボットには、足や腕、手に装着する「外骨格型」と、手足を介して人体とインタフェースをとる「エンドエフェクタ型」の2種類がある。下肢であれば運動能力の回復、上肢であれば器用さの回復が主な目的となる。
また、リハビリテーションロボットは、治療を行う手段としてだけでなく、評価のためのツールとしても機能する。搭載されたセンサーが治療過程での動作特徴の測定を行い、従来の臨床評価尺度では捉えきれない、きめ細かな見解を提供できる。
2010年までの10年間では、「Lokomat®」に代表される歩行リハビリテーション用のトレッドミル型外骨格や、「InMotion ARM®」に代表される上肢リハビリテーション用のエンドエフェクタ型ロボットなど、第一世代のロボット機器の臨床評価と商品化が主な研究成果だった。2000年代前半には、肘や肩から先の特定の関節運動を対象とした上肢用の外骨格型ロボットの開発が始まり、下肢用では地上での歩行を促進する外骨格型ロボットが登場した。
ホットトピックス(5)カプセルロボット
Given Imaging社(現Medtronic社)は、最小侵襲の消化管検査法としてワイヤレスカプセル内視鏡を発表した。錠剤を飲むだけで腸の奥深くの画像を採取できるということで、消化管内視鏡の分野に革命を起こし、医療用カプセルロボットという新しい研究分野を生み出した。
この10年では、体内のカプセルロボットを外部から操作するために、磁気を利用した駆動方法が検討された。この方式では、外部(永久磁石や電磁石など)から発生させた磁界を通してカプセル(磁石を内蔵)を操作するというもの。これにより、カプセルの向き(ポーズ)と位置を制御し、相対的な動きを誘発できるようになった。これまでは、外部の永久磁石を手動で操作する方法から、磁場をロボットで制御する方法へと発展してきた。今後は、リアルタイムでカプセルの位置と向きを特定する技術が求められている。
将来的には、エネルギー貯蔵やワイヤレス給電技術の進歩、またマイクロ/ナノロボティクスと組み合わせることで、これまでにない診断・治療を提供できる可能性があるだろうという。
ホットトピックス(6)医療用磁気アクチュエーター
磁場が体内の画像を撮るために使われる以前に、外科手術にも使われていた。1950年代には、先端に磁石を取り付けたカテーテルを誘導するための研究が始まり、商品化されたのは2003年にStereotaxis社から発売されたロボット磁気ナビゲーションシステム「Niobe®」。2つの永久磁石を動かして変化する磁場を発生させ、心臓の不整脈を治療するための心内膜カテーテルアブレーションを誘導するシステムだ。
磁気誘導式カテーテルシステムはこの10年間で、研究者や医療機器メーカーの関心が高まったため、発表された論文数や引用数が増加している。関心が高まっている理由の一つに、磁気誘導カテーテルは複雑なプルワイヤー(pull-wire)やモーターを使ったデバイスよりも経済的に製造できるため、より小さなスケールの操縦可能な医療デバイスとして期待されているからだ。これらの取り組みの多くがすでにインビボ実験、さらには人への適用へと移行している。次の10年では、この技術を使ってより効果的な治療法が実現され、商業的な取り組みが急速に加速するだろうという。
ホットトピックス(7)医療用ソフトロボティクス
医療用ソフトロボティクスの分野を確立したのは、ロボット工学のどの分野の成果なのかを明確にすることは容易ではない。当初からバイオミメティクスやバイオインスバイアードと密接に結びついているのがその一因だ。
バイオインスバイアード型ロボットへの関心の高まりを受けて、ソフトロボットの製作やソフトロボットへのセンシングおよびアクチュエーション機能の付与の研究が促進された。センシング機能を備えた人工皮膚に関する研究は、ソフトロボットやソフトデバイスへの応用を目的とした文献に多く見られた。
過去10年間で最も引用された論文のうち、材料に関する論文・サーベイ論文を除いて考えた場合2種類のテーマがある。1つは、これまでのホットトピックスで取り上げてきたリハビリテーションや人間の増強のためのウェアラブルロボットへの応用。もう1つは、介入・手術用のロボットや、介入・手術用ロボットのコンポーネントへの応用だ。
後者の手術と介入の分野に関しては、例えば、手術用マニピュレーターの一部機能にソフトロボティクス技術が応用されており、前出のカプセルロボットにも同様な取り組みが見られる。さらに、生体内の補助装置や治療装置にもソフトロボティクス技術が応用されている。
ホットトピックス(8)医療用連続体ロボティクス
医療用連続体ロボットとは、多くの関節を持ち、蛇のようにクネクネと3次元の曲線で曲がるロボットを指す。その特徴から、開口部から体内に入り、組織を通過する際に構造物を回避しながら体内を移動できる。連続体ロボットの作動方法は、中央の柔軟な骨格の周りに配置された1つまたは複数の腱にかかる変位または張力を変化させる方法や、同心円状に組み合わせた弾性チューブの相対的な移動と回転を利用して形状を変化させる方法などが挙げられる。
2010年から2020年の間、連続体ロボットの研究は、さまざまな角度から探求されてきた。例えば、外部との接触や負荷を考慮した運動モデルの拡張はその一つ。連続体ロボットは性質上、体内でいくつもの組織に接触する。そのたび連続体ロボットは大きく変形するため、運動モデルに外部負荷を含めたり、腱張力などの運動入力変数から外部負荷を推測したりすることが重要な研究課題となっている。そのため、過去10年間で、ロボットの形状を推定できるセンサーの開発が進められてきた。
他にも、ロボットの剛性を制御する方法の開発が挙げられる。連続体ロボットには固有の柔軟性があるため、体の中を通って手術部位まで移動する際の安全性が高い。しかし、これまでの連続体ロボットは、先端部の剛性が低かったため、外科手術において治療が必要な組織に力を加えるタスクが困難だった。一定の力を出すためには制御を通してロボットの変位を大きくする必要があり、この10年で連続体ロボットの剛性を強化・制御するための機械設計手法が開発されてきた。
新たな試みとして、ソフトな連続体ロボットも挙げられる。連続体ロボットの多くはポリマー素材で作られており、初期の例では空気圧や油圧で作動するものもあった。一方で、モデリングの複雑さや応答時間が増加する傾向にあるため、ガスや流体による作動は避けられてきた。だが、ソフトロボティクスが普及したことで、これらの作動方法や、より反応性の高い素材の使用が検討されるようになった。
最後に
医療用ロボットに関する論文数は、この10年で飛躍的に増加した。この分野では、包括的な臨床試験はまだ行われていないが、多くの患者のメリットが実証されている。例えば、入院期間の短縮、回復の早さ、再手術の減少、輸血の減少など。外科医にとっても、手で直接操作する場合に比べて、首や背中の痛み、手や手首のしびれ、肉体的・精神的ストレスの軽減につながる。これらの要因は、外科医の生活の質を向上させ、キャリアを長くする可能性がある。
今後、医療用ロボットが発展していく上でポイントの1つになるのが、ロボットの自律性だ。それは、リアルタイムのセンサーデータに基づいてロボットが計画を立てたり、動作を変更したりする能力を持たせること。例えば、自律的に腹腔鏡手術を行って癌を除去したり、自律的にカテーテルで心臓弁を修復したり、このような自律性を実現するためには、技術的な課題だけでなく、規制、倫理、法的な課題もあり、商品化にはほど遠いと予測している。
そのため、今ある医療ロボットに対して段階的に且つ部分的に自律機能を追加していくことが現実的といえる。例えば、腹腔鏡手術の自動縫合、軟性内視鏡の自律的なナビゲーション、心臓内のカテーテルの自律的なマッピングなどが挙げられる。このように段階的に自動化を進めていく方法で、アルゴリズムやセンサーの技術開発に必要な時間を確保しつつ、利害関係者が適切な規制や法的枠組みを段階的に構築していけるだろうという。
一方、1990年までに遡ると、それ以降に発表された医療用ロボットに関する19,000以上の工学論文のうち、既存の商業医療用ロボットに応用できたものはほんの一握りなのが現実である。技術的影響力の高い論文でも、特許の引用数がわずかなものも多数ある。これは、技術開発とその商業的応用との間にミスマッチがあることが原因だろう。
ロボット技術を臨床応用にするためには、真の臨床ニーズを特定しなければならない。このニーズに応えるためには、ロボットが臨床医と患者にどのような価値をもたらすかを具体的に考慮した関連技術を開発ことが求められている。
また、病院の管理や財政上の制約を十分に考慮し、確立された臨床ワークフローを阻害しないように技術を開発する必要がある上に技術を導入するために十分な投資も得られるようにしなければならない。これらを踏まえ、商品化に辿り着くまでには、研究者は技術だけを探求するのではなく、同時に、臨床医、規制当局、投資家、ビジネスコミュニティなどと深い協力関係を築くことも必要になってくるだろうと述べている。
Source and Image Credits: Pierre E. Dupont, Bradley J. Nelson, Michael Goldfarb, Blake Hannaford, Arianna Menciassi, Marcia K. O’Malley, Nabil Simaan, Pietro Valdastri, and Guang-Zhong Yang, “A decade retrospective of medical robotics research from 2010 to 2020”, SCIENCE ROBOTICS, 10 Nov 2021, Vol 6, Issue 60, PG – eabi8017
関連記事
相手IDやペアリング、外部機器不要。机上のスマートフォン間だけで「その場限り」の無線データ共有を実現【研究紹介】

手術なしで顔に電子機器を埋め込むメイク技術 ユーザー操作で頬を赤らめ涙を流すことが可能【研究紹介】
リアルアバターの動きに応じた「複雑な光の当たり方」をリアルタイム合成 Facebookなどが深層学習フレームワークを開発【研究紹介】
人気記事

Zustand、Jotai、Valtioの作者はなぜReact状態管理OSSを3つ開発したのか【フォーカス】
【7/23(水)オンライン開催!】Devin/Cursor/Cline全社導入 セキュリティリスクにどう対策した?
Rubyへの型導入、実際にどんな利点がある? 壊さず進める大規模コード改善の実践知