![]()
最新記事公開時にプッシュ通知します
![]()
1本の指だけで操れるタコ足触手ロボット「E-SOAM」。吸盤からの感触や温度も伝わる【研究紹介】
2023年12月5日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
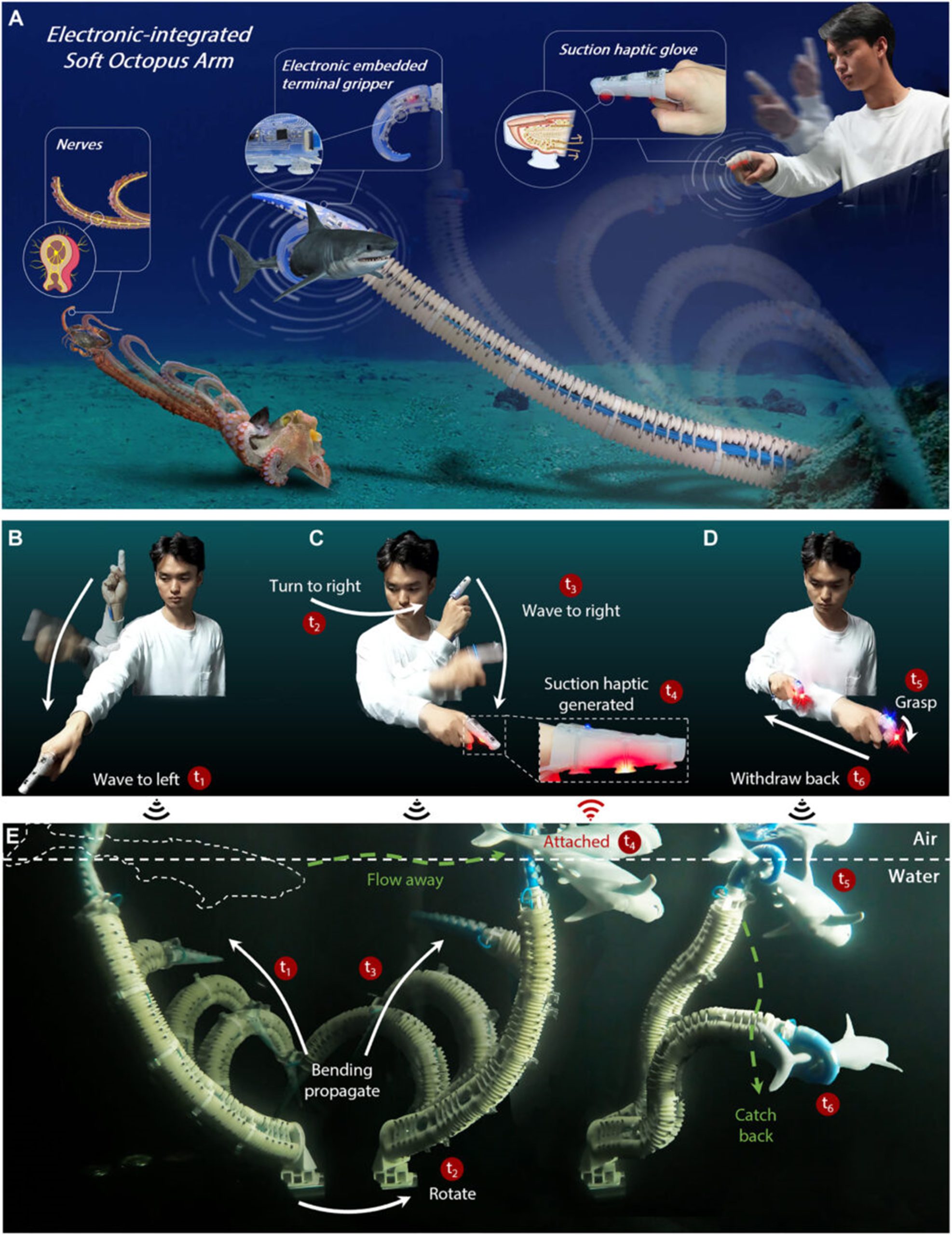
北京航空航天大学などに所属する研究者らが発表した論文「Octopus-inspired sensorized soft arm for environmental interaction」は、タコの獲物を捕獲する動きに触発された柔軟な触手ロボットを提案した研究報告である。
この触手ロボットは、先に存在する獲物に向かって腕が伸び、先端のグリッパーが曲がって捕獲する一連の動作が実行可能である。操縦者は、指用グローブを使用してリアルタイムにこれらの動作を遠隔操作でき、その際、吸盤から伝わる吸引や温度も感知しつつ、双方向のフィードバックを通じて感覚的に操作が行える。
課題
タコは獲物を捕まえる際、まず触手の根元から屈曲を開始する。この屈曲は「屈曲伝播」と呼ばれ、腕の神経節からの筋肉活動が前方に向かって波のように伝わり、獲物に向かって伝播する。いくつかの吸盤が対象物に付着すると、吸盤の非常に敏感な神経ネットワークが活動し、停止と掴む信号を引き起こす。その後、触手の先端部分が対象物を包み込み、さらに多くの吸盤でしっかりと掴む。最終的には、獲物をタコの口元に引き寄せる動きが行われる。
この一連の動作をロボットシステムで実装する場合、2つの主要な課題が存在する。
第一の課題は、効果的な屈曲伝播の動きを実現することである。タコの腕は無限の自由度を持ち、そのような過剰なシステムを制御することは非常に難しい。
第二の課題は、柔らかいロボットシステムが感覚、信号処理、通信のコンポーネントを統合して、周囲の世界と相互作用することである。柔軟な電子機器や電子回路を持たない技術はいくつか実現されているが、高度に変形可能な柔らかいロボットに伸縮性のある電子回路を統合し、複数の感覚能力(屈曲、吸引、温度など)を持たせることは、これまで報告されていない。
研究内容
この研究では、感覚処理ネットワークとタコの腕の伝播する動きを組み合わせ、電子機器を統合した柔軟なタコの触手ロボット「E-SOAM」を提案する。E-SOAMは、ターゲットへの到達、知覚、掴む機能を備える。
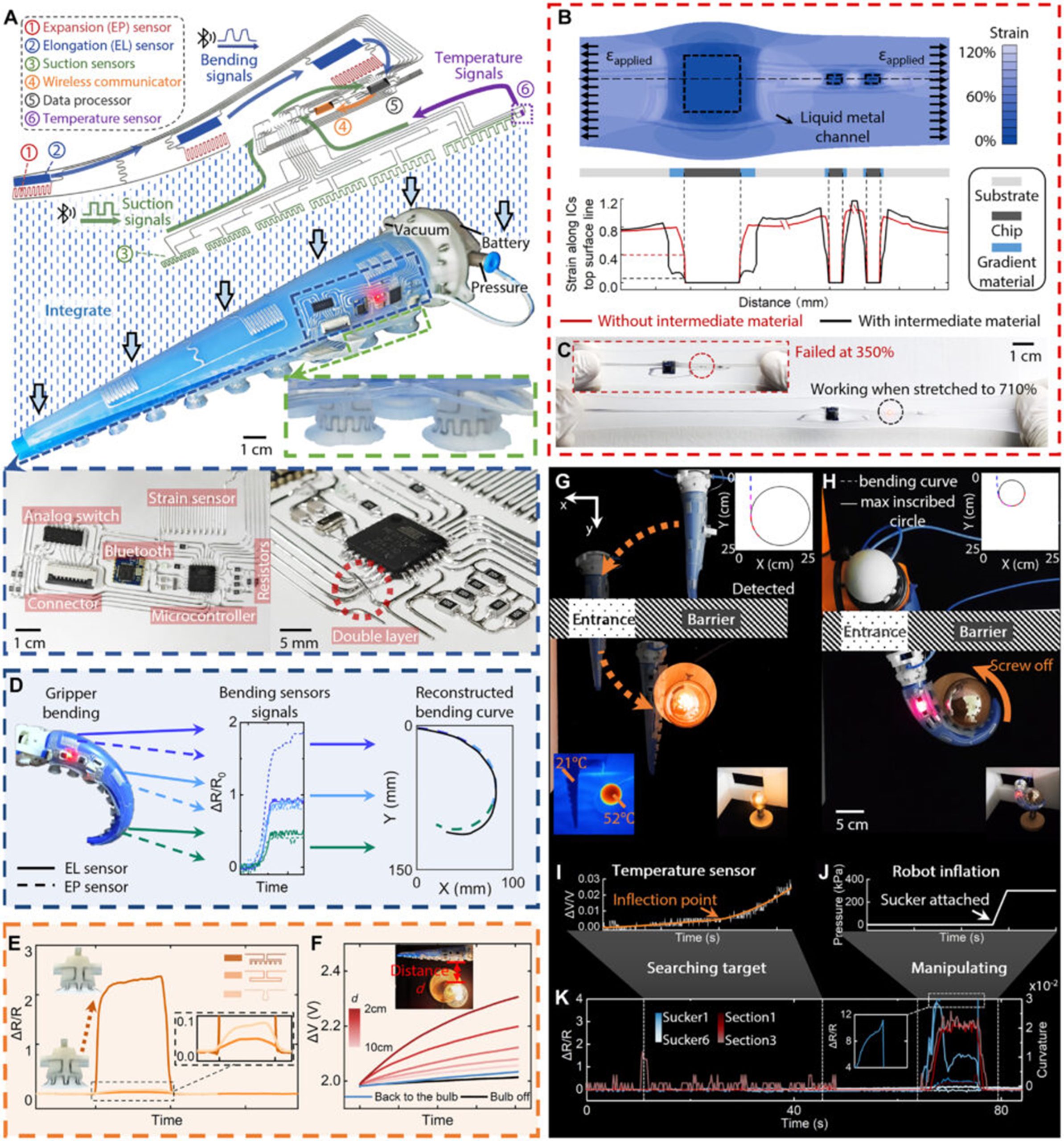
このシステムは、柔らかい腕部と先端のテーパー形状のグリッパー部から成る。腕部は、電子ネットワークが組み込まれた5つの柔らかいシリコンセグメントで構成されており、空気圧によって動作し、柔軟に曲がり伸縮する。
グリッパー部は、タコの神経機能を模倣する伸縮性のある液体金属ベースの電子回路が備わっており、屈曲と吸盤の感覚情報を高度に変形可能な状態で処理することが可能である。グリッパーは柔軟に方向転換や曲がるだけでなく、吸盤が獲物に接触して吸引した際の触覚をフィードバックする。また、吸盤内の熱センサーは吸盤近くの温度を感知する。
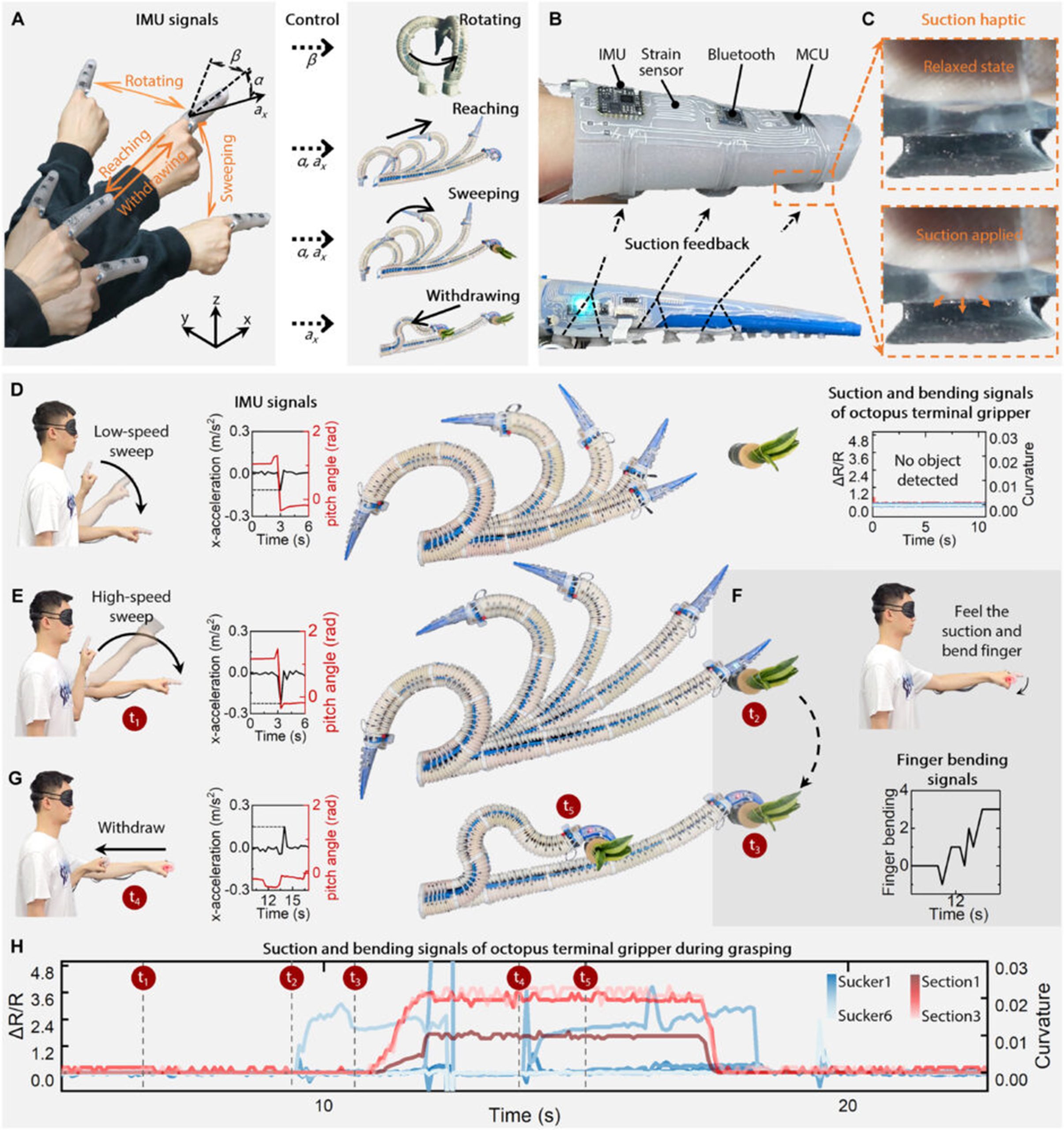
これらの触覚フィードバックは、操縦者が装着するウェアラブルな指用グローブに送信される。このグローブには、液体金属をベースとした伸縮性のある電子回路が利用されており、柔軟な曲げが実行できる。
操縦者は、このグローブを使用してE-SOAMを制御し、タコのように対象に到達して掴むことが可能である。操作者が腕の根元を回転させると、タコの腕のように方向が変わり、腕を伸ばすと腕が伸びる。指の方向を変えるとグリッパーの向きが変わり、指を丸めるとグリッパーが丸まる。この一連の動作により、獲物の捕獲を目指す。
実証実験
E-SOAMは、元の腕の長さの1.5倍までの範囲で到達・掴み・引き戻す動作を行うことができる。グリッパーに関しては、一軸方向に710%、二軸方向に270%まで伸びることがテストで示された。さらに、最適化された伸縮性電子回路は、水中環境でも機能することが確認されている。
物体の捕獲能力に関するテストでは、操縦者が1本の指を動かすことで、E-SOAMの到達と掴みを遠隔かつ対話的に制御できることが示された。また、操作者が目隠した状態でも、触覚フィードバックのみを使用して対象物を探し出し、掴むことにも成功した。
Source and Image Credits: Zhexin Xie et al. ,Octopus-inspired sensorized soft arm for environmental interaction.Sci. Robot.8,eadh7852(2023).DOI:10.1126/scirobotics.adh7852
関連記事

【LOVOT】ロボットに「生命」を宿す。開発チームに聞く「人と絆を結ぶUX」のつくりかた
4足歩行ロボットは野外でも「生存」できるか? 険しい山道や雪が積もる階段など 未知なる環境でも自律歩行に成功【研究紹介】

材料を「空中に浮かせながら」工作するロボット、部品や接着剤の液を音で浮遊させ、接触なしで組み立て可能【研究紹介】
人気記事

【3/5(木)ハイブリッド開催!】テスト設計のAI活用 ~ 期待通りの出力を得るためのコンテキスト設計 ~

だって最高のホビーだから。プログラミング言語「HSP3」を30年開発している理由【フォーカス】

「国産ヒューマノイドは巻き返せる。だが、いまが最後のチャンス」。日本のロボット開発の厳しい現実と、起死回生の道筋