![]()
最新記事公開時にプッシュ通知します
![]()
置いてあるモノを“器用”につかむバーチャルハンド 持つ前の予備動作に秘密あり【研究紹介】
2023年8月9日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
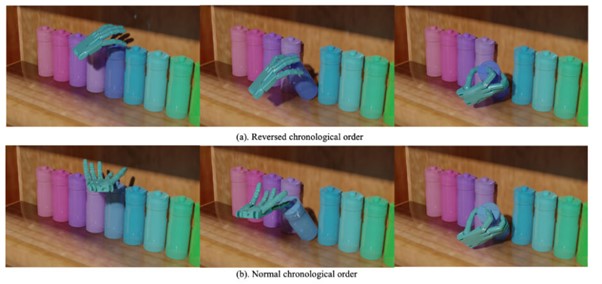
香港大学と米スタンフォード大学に所属する研究者らが発表した論文「Synthesizing Dexterous Nonprehensile Pregrasp for Ungraspable Objects」は、バーチャル環境で物体を掴む際により器用な動きを実現するためのフレームワークを提案した研究報告である。人間の動きを模倣して、物体を掴む前に予備動作を行うことで、リアルな持つ動作を実現する。
研究背景
器用な多指の手で物体を操作することは、人間の重要な能力である。特に、通常では不可能な作業を行うために環境との接触を利用することに長けており、「非把持前動作」という戦略を利用している。非把持前動作は、物体を直接つかむ前に、指で軽く物体を移動させて把持しやすい状態にする方法を指す。
この戦略により、密集している中にある物体でも、ダイレクトにつかめない状態でも容易に把持できるようになる。
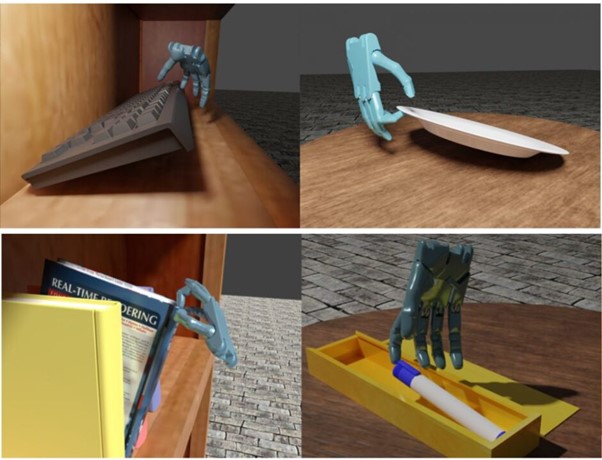
例えば、ぎっしりと詰まった本棚から本を取る場合、最初に1本の指で本の上部を押して外側に出してから把持して本を手に取る。別の例では、筆箱内のペンを取るときは、人差し指を使ってペンを筆箱に押し付けて斜めにしてから掴んで手に取る。
これらの行動は人間にとって自然な動作だが、バーチャルアバターには実装されていないため、物体を取る際に対象物が浮いたりして不自然に見えてしまうことがある。
研究内容
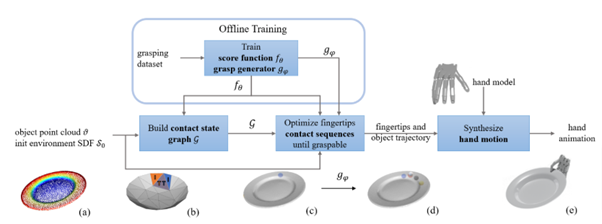
この研究では、把持しにくい環境において物体を把持可能にする、物理的にリアルな非把持前動作を合成する手法を提案する。特に、周囲の環境や手との接触を活用してこれを実現する。
把持の前段階における「把持のしやすさ」の正確な指標を定義することは容易ではない。この段階での明らかな目標は、物体の表面を露出させることだが、それは把持前の段階での指の接触が、後にしっかりとした把持に流れるように移行できるように行われなければならない。このように最大化したい把持可能性は、物体の現在の状態、環境、接触点を確立した指、まだ接触していない指に依存する。
実現するために、まず様々なシナリオで器用な把持を行うデータセットを作成し、把持可能性の指標を学習する。次にその指標を使って、物理ベースのシミュレータで粒子ベースの軌道最適化を行う。これにより、シミュレーションを通じて物理的に把持可能な軌道を効率的に見つけることができる。
実験では、合成されたハンドアニメーションの豊富で多様なセットを示すことにより、本方法を定性的に評価する。また、本手法の頑健性、未知のオブジェクトへの適用可能性、アブレーション(特定の要素を除去した場合の影響)に関する定量的な分析も行う。
実装では、28自由度(22関節と6手首ポーズ)の5本指ハンドモデルを使用する。
テストするために、
- (1)本棚に並べられた本
(2)テーブルの端に平らに置かれた定規
(3)壁際の棚に置かれたコンピュータのキーボード
(4)平らなカードボード
(5)テーブルの上に置かれたディナープレート
(6)食品容器
(7)密に並べられたスパイボトル
(8)筆箱に収納されたマーカー
など、8つの多様なシナリオをデザインする。
実験結果
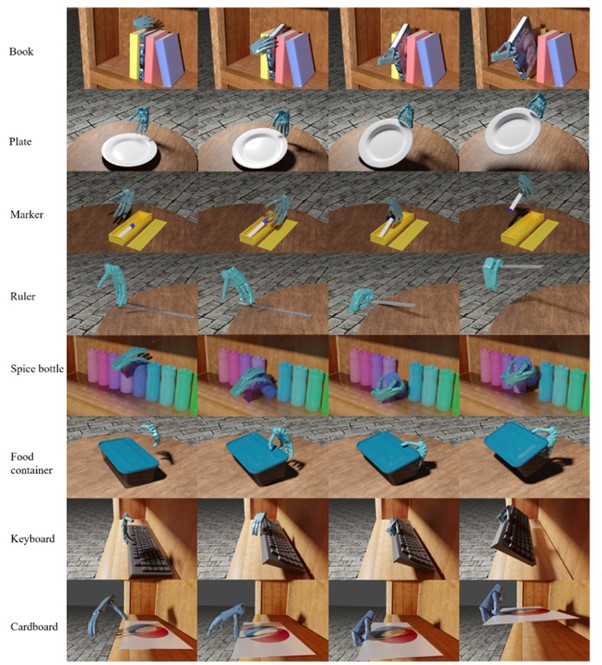
実験の結果、全てのシナリオにおいて、本手法が物体を把持可能な状態に操作するために、自然でもっともらしい非把持前動作を合成できることを示す。すなわち、(1)底面を露出させるために物体をスライドさせて再配置する(定規、平らなカードボード)、(2)周囲に対して物体を旋回させ斜めにする(マーカー、キーボード、本、スパイスボトル)、(3)指の摩擦を利用する(食品容器)、(4)幾何学的特徴を利用する(皿)。

さらに、今回のような手法はオブジェクトのデータセットで訓練された学習ベースのコンポーネントを含んでいるため、未見の物体への汎化性を実証することは重要である。実験の結果、訓練データセットとは異なる未知の物体に対しても適用可能であることを実証した。
Source and Image Credits: Sirui Chen, Albert Wu, and C. Karen Liu. 2023. Synthesizing Dexterous Nonprehensile Pregrasp for Ungraspable Objects. In ACM SIGGRAPH 2023 Conference Proceedings (SIGGRAPH ’23). Association for Computing Machinery, New York, NY, USA, Article 10, 1–10. https://doi.org/10.1145/3588432.3591528
関連記事
アニメ業界のエンジニアリング改革に向き合って 『シン・エヴァ』の制作を支えた「スタジオカラー」のシステムづくり
「ほぼ実世界。リアルすぎるバーチャル空間を構築」多視点の写真から精密な3Dシーンを作成【研究紹介】
手書きした絵コンテの人物画を3Dキャラクターに自動変換する「Sketch2Pose」 不自然なポーズも自動修正【研究紹介】
人気記事

テスト設計のAI活用 ~ 期待通りの出力を得るためのコンテキスト設計 ~

だって最高のホビーだから。プログラミング言語「HSP3」を30年開発している理由【フォーカス】

「国産ヒューマノイドは巻き返せる。だが、いまが最後のチャンス」。日本のロボット開発の厳しい現実と、起死回生の道筋