![]()
最新記事公開時にプッシュ通知します
![]()
手書きスケッチで描いたキャラやロボットの関節を自在に動かせるデザインツール 韓国チームが開発【研究紹介】
2022年8月18日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
韓国KAISTの研究チームが開発した「Rapid Design of Articulated Objects」は、多関節型オブジェクトのコンセプトスケッチを描いている最中に、そのオブジェクトの部分的な動きをインタラクティブに操作できるデザインツールだ。
静的なコンセプトスケッチと違い、各関節の回転運動やスライド運動などを両手操作で瞬時に制御でき、デザイン作成の初期段階で動きの試行錯誤を十分行いながら設計できる。
課題
アイデアをイメージしやすくするために、手書きのストロークで描く絵をコンセプトスケッチというが、デザイン設計を可視化できる利点や、同僚やクライアントにアイデアをすぐに伝えられる利点など便利である。
しかし、これらのコンセプトスケッチは静止画に過ぎず、3Dスケッチでも異なる角度から見るくらいしかできないため、そのデザインが部分的にどのように駆動するかを見せて動きの魅力を直感的に説明することはできない。
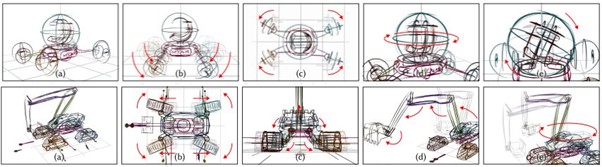
ここでいう動きとは、多関節型オブジェクトの変形プロセスを指す。例えば、ドローンの足が折りたたまれる動き、クレーン車のアーム部分(ブームとバケットなど)の動き、4足歩行ロボットの足の動き、車から2足歩行ロボットに変身する際の動きなどだ。
デザイナーはこのような多関節型オブジェクトをデザイン設計する場合、ある状態だけでなく、他のすべての状態でも見栄えがよく機能的で、各状態間の遷移が魅力的で協調的でなければならないことなどを考える。つまり変形を伴う多関節型オブジェクトのデザインは、可動部を考慮しなければならないため、難易度が非常に高くなる。
研究過程
今回はこれらの課題に対して、コンセプトスケッチの段階で描いたパーツを動かしてテストできるデザインツールを提案する。このデザインツールを活用すると、初期段階の設計であるコンセプトスケッチで動きを試行錯誤できるため、デザイナーにとってイメージがしやすくより迅速にデザインを仕上げることができる。その上、同僚やクライアントにアイデアを伝える際も直感的かつ的確に伝えることができる。
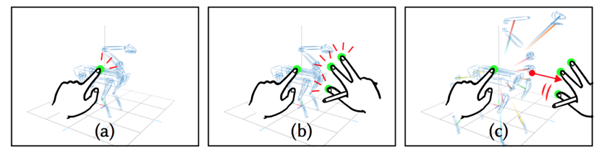
具体的な操作は次のようなものだ。スケッチした多関節型オブジェクトの関節を動作したい場合、両手を使って直感的に動かす。左手でペットボトルを持って本体を固定してから右手でキャップを捻って外すように、多関節型オブジェクトの本体を左手でタップし押さえてから右手でタップし動かしたい方向に動かす。すると、その部分だけが動作する。
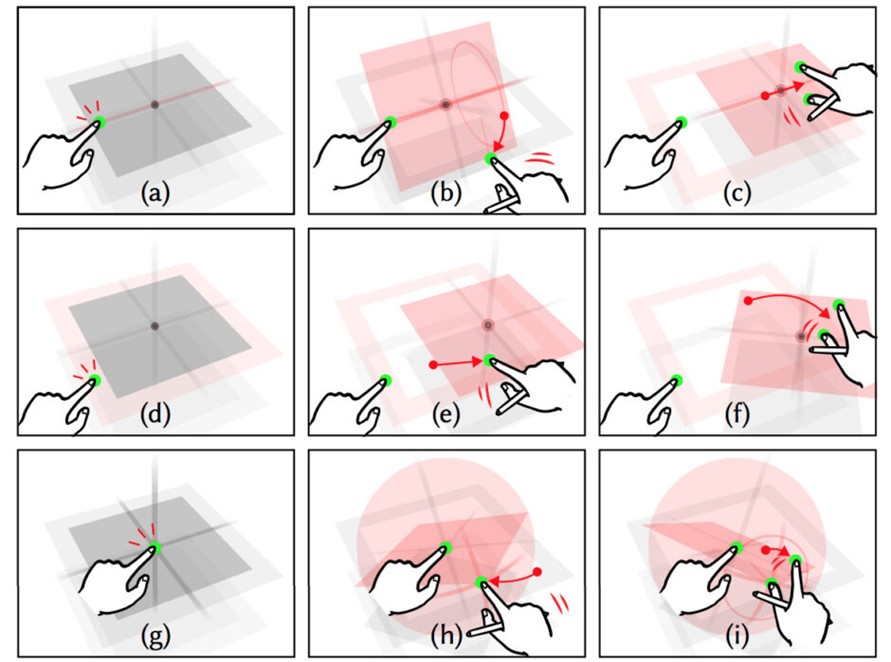
関節の動きは多数あり、それぞれ指の置く位置と本数、動かし方で動きの内容が変わる。例えば、割り当てた平面の軸を左手で押さえ右手の指1本で回転させると軸を中心に回転する。左手で軸を押さえ右手の指2本でスライドさせるとスライドさせた方向に平行移動する。左手で押さえた点を中心に右手でグリグリ回転させると3次元的に回転する。このように、左手の抑える位置と右手の指の本数と動かし方で多様な動きを生成できるわけだ。
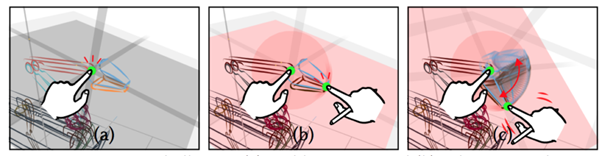
これら動きを駆使してリギングの設計も直感的に行え、またリギングで動かしたときのアニメーションの様子を好きなカメラ位置で撮影し録画もできる。
さらに右手の指3本のスライドでパーツを一時的にバラバラに分解することもできる。例えば4足歩行ロボットをスケッチした場合、両手操作で胴体に接続している4本の足パーツを離すことができ、組み立て時では見えなかった箇所の補正が行える。再度の組み立ても瞬時に行える。
評価
今回のデザインツールを効果的に評価するため、平均勤続年数6年のプロのデザイナー5名を採用し、24時間の本デザインツールの利用、20種類の多関節型オブジェクトの作成、38のシステム関連の質問に対するスコア、7.5時間のインタビュー調査を実施した。
その結果、本システムは約1時間で習得でき、満足のいく前後のワークフローを促進し、デザイナーが既存のツールやプロセスよりもはるかに短時間で、初期段階のデザイン決定に適したコンセプトを迅速に作成できることがわかった。
Source and Image Credits: Joon Hyub Lee, Hanbit Kim, and Seok-Hyung Bae. 2022. Rapid design of articulated objects. ACM Trans. Graph. 41, 4, Article 89 (July 2022), 8 pages. https://doi.org/10.1145/3528223.3530092
関連記事

「テレポート会議」ができるレベル 全身の動きを忠実に真似する実写アバターを米Metaが開発【研究紹介】
「ほぼ実世界。リアルすぎるバーチャル空間を構築」多視点の写真から精密な3Dシーンを作成【研究紹介】
VR空間に籠もって仕事ができる個室 部屋内で起きる実世界の出来事をリアルタイム再現・後から3D再生可能に【研究紹介】
人気記事

テスト設計のAI活用 ~ 期待通りの出力を得るためのコンテキスト設計 ~

だって最高のホビーだから。プログラミング言語「HSP3」を30年開発している理由【フォーカス】

「国産ヒューマノイドは巻き返せる。だが、いまが最後のチャンス」。日本のロボット開発の厳しい現実と、起死回生の道筋