![]()
最新記事公開時にプッシュ通知します
![]()
英国の16歳少年がレゴのみで“人間の手”を再現。国際ロボット会議IROSで“親子論文”を発表【研究紹介】
2025年10月28日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
英ブリストル・グラマー・スクールに通う16歳のJared Leporaさんと、英ブリストル大学のロボット工学教授であり父親のNathan Leporaさんらは、レゴマインドストームのパーツのみを使用して人間の手を模倣した高機能ロボットハンド「Educational SoftHand-A」を開発した。
このロボットハンドは、ロボットの国際会議「IROS 2025」で論文「Educational SoftHand-A: Building an Anthropomorphic Hand with Soft Synergies using LEGO® MINDSTORMS®」として発表された。

ヒトが物を掴む際の指同士の連携を模倣
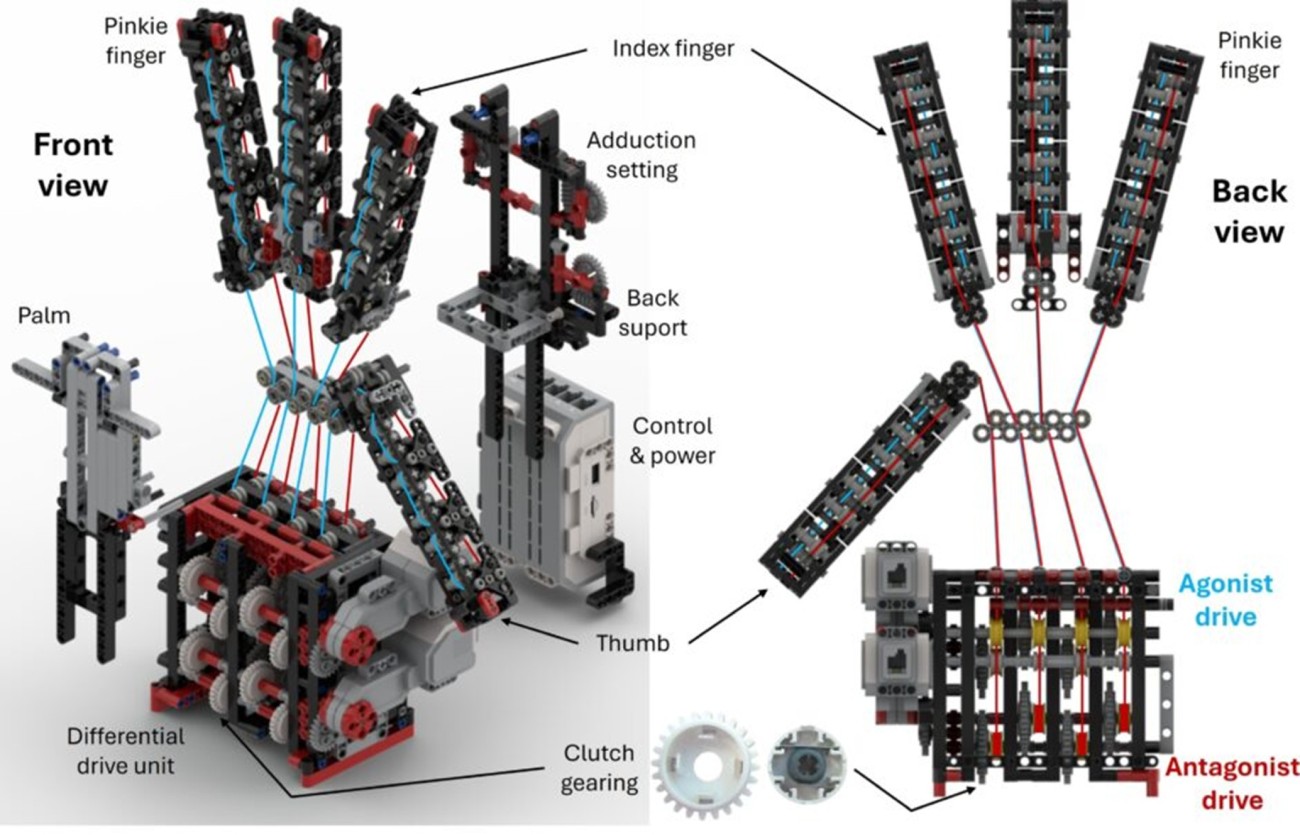
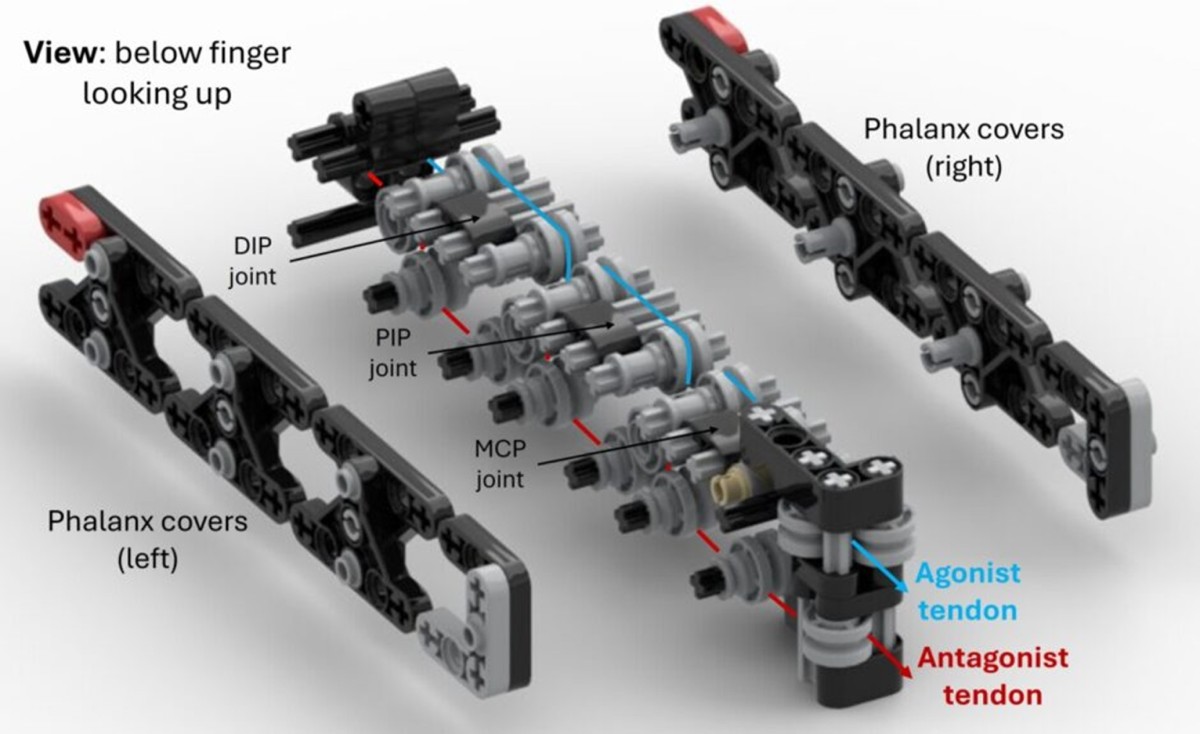
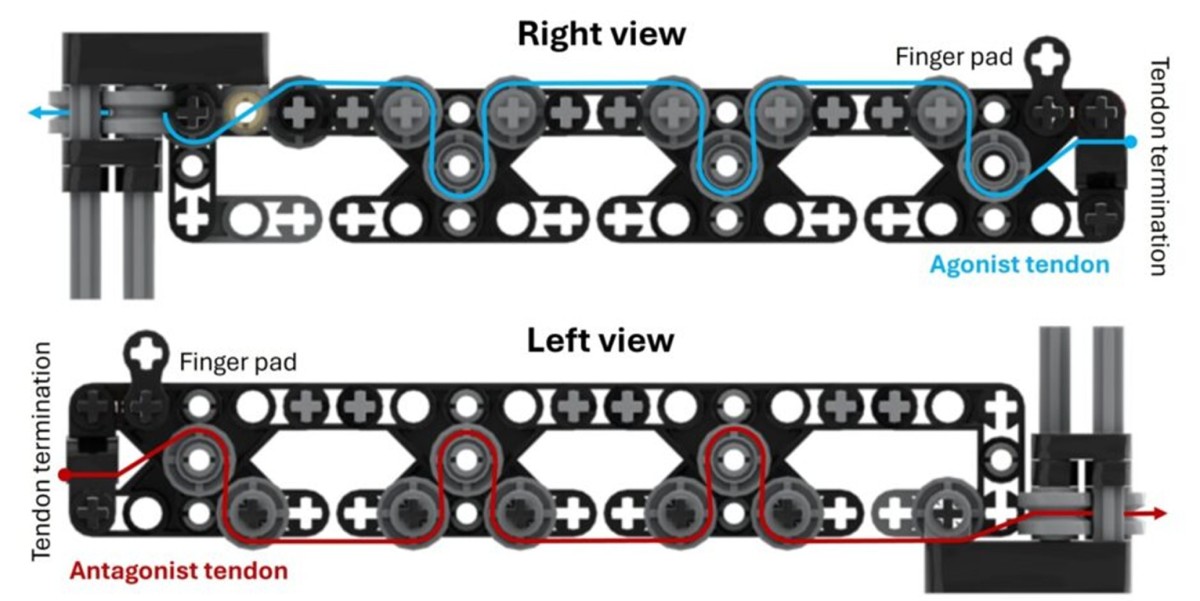
このロボットハンドの仕組みは人間の筋肉の働きをまねている。各指には2本のひもが通っており、1本を引っ張ると指が曲がり、もう1本を引っ張ると指が伸びる。これは人間の手で、主動筋と拮抗筋が対になって働くのと同じ原理である。
4本の指(親指1本と指3本)にはそれぞれ3つの関節があり、レゴのクラッチギアでつくられた差動装置が指を連結し、物体に触れるまで一緒に動き、触れると止まる。2つのモーターでひもを制御することで、コップや靴、ボール、ぬいぐるみなど、800グラムまでの多様な物体を掴み持ち上げることができる。
このロボットハンドは、完全に閉じるのに0.98秒かかり、完全に開くのに1.12秒かかる。ロボットハンドの指1本は5ニュートンの荷重に耐え、6ニュートンの重量を押し出すことができた。
工夫として、4本の指がバラバラに動くのではなく、協調して動くようになっている。これは「ソフトシナジー」と呼ばれる仕組みで、人間が物をつかむときに指が自然に連携するのと同じである。LEGOの歯車を使った特殊な機構により、この複雑な動きを実現した。

もともとこの技術は、イタリアの研究所が開発した高価な3Dプリンター製のロボットハンドが基になっている。それを子供でも組み立てられるLEGOで再現した。
LEGOだけでつくるという制約から、指の数を4本に減らしたり、3Dプリント版で使用される約150個の金属ベアリングと複数のバネを、100個以上のベアリングとクラッチギアで代替したりする必要があった。この設計により、シンプルな駆動と制御機構でありながら、人間の手のような自然な動きを実現している。
Source and Image Credits: Lepora, Jared K., et al. “Educational SoftHand-A: Building an Anthropomorphic Hand with Soft Synergies using LEGO MINDSTORMS.” arXiv preprint arXiv:2510.15638 (2025).
関連記事

卵を割り服を畳める2本腕ロボット「Mobile ALOHA」 人の動きを模倣、米スタンフォード大が開発【研究紹介】

1本の指だけで操れるタコ足触手ロボット「E-SOAM」。吸盤からの感触や温度も伝わる【研究紹介】

「人が乗れる変形ロボ」の実現に立ちはだかる壁|それでもロボット建造師はロマンを追う【フォーカス】
人気記事
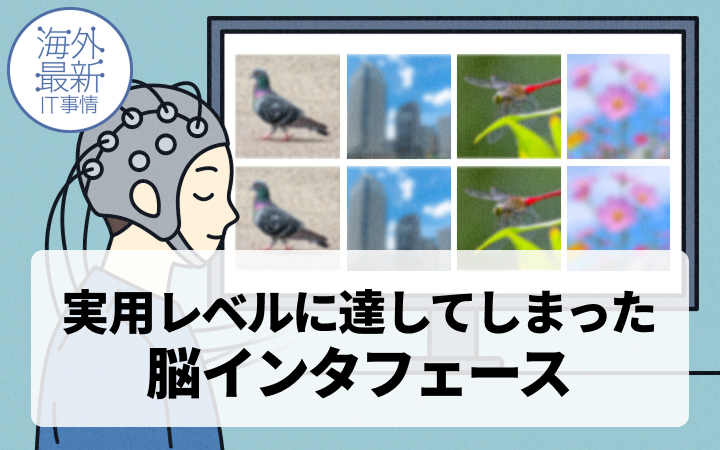
5億画素だがUSBポートなし。人間という「デバイス」に接続し、脳内イメージを画像化する技術

React状態管理ライブラリの選択指針:「ローカル/グローバル/サーバー」における使い分けの基準
【2/4(水)オンライン開催!】型定義&インタラクションテストでAIフロントエンド開発のガードレールを整備する