![]()
最新記事公開時にプッシュ通知します
![]()
卵を割り服を畳める2本腕ロボット「Mobile ALOHA」 人の動きを模倣、米スタンフォード大が開発【研究紹介】
2024年1月5日


先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
米スタンフォード大学の研究者らが発表した論文「Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation」は、人間のデモンストレーションを模倣させ、ロボットに移動操作タスクを学習させる低コストなシステムを提案した研究報告である。訓練されたロボットは、2本の腕を駆使して高度な料理や丁寧な掃除、細かい組み立て作業などをこなすことができる。
▲模倣学習したMobile ALOHAが自律して移動操作タスクをする様子がわかる動画
研究背景
人間が示すデモンストレーションからロボットが学ぶ「模倣学習」という学習方法がある。この学習方法は、ロボットに多様なスキルを教える有望な手法であるが、日常の環境で必要とされる作業の多くは、単独の移動や操作だけでなく、全身の調整を要する。また、このような模倣学習の広範囲な適用にあたっては、全身テレオペレーション用の手頃な価格のハードウェアが不足している。

研究内容
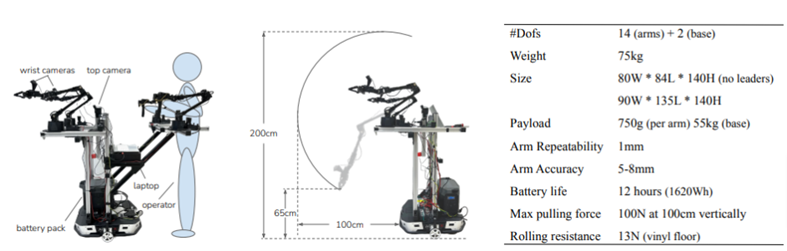
これらの課題に対処するため、低コストな全身テレオペレーションシステム「Mobile ALOHA」を提案している。このロボットは、車輪付きの本体部分により前進後退などの基本的な移動操作をし、前方に備わった2本のアームが物を掴む動作を行う。操作を教える際には、オペレーターがロボットの背後から2本のアームを直接操作してタスクを実演する。
また、模倣学習の分野では、本体部分の動きと腕の動作を連結して直接模倣学習を行うことで、強力な性能を実現できる。2本の腕を持つ移動操作のデータセットはほとんど存在しないため、静的な2本の腕のデータセットを活用し、模倣学習のパフォーマンスを向上させるアプローチを採用している。
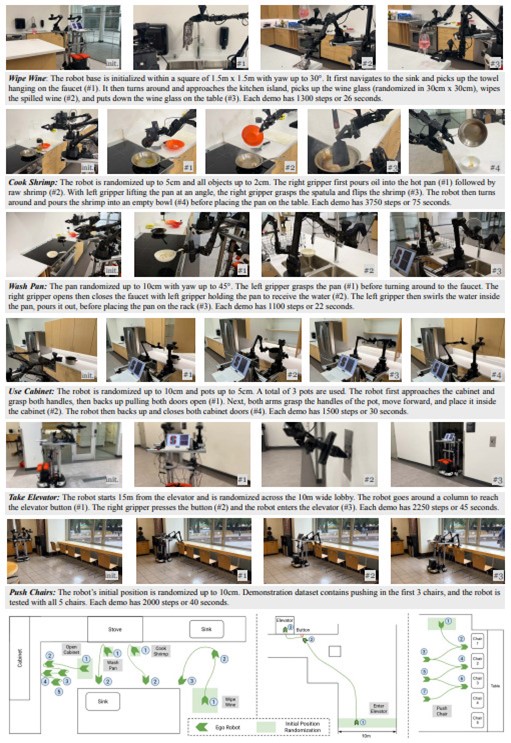
このシステムにより、ロボットは複雑な長時間のタスクを実行できる。例えば、ワイングラスを持ち上げてその下のワインのシミを拭き取る、フライパンを持ちながらエビを裏返して両面ソテーするなどの作業が可能である。他にも、卵を割る、服を畳む、ラップをかける、スマートフォンに充電器を差し込むなど、細かな作業が行える。タスクごとに50のデモンストレーションを行うことで、最大90%の成功率を達成できた。
Source and Image Credits: Zipeng Fu, Tony Z. Zhao, Chelsea Finn. Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation.
関連記事

1本の指だけで操れるタコ足触手ロボット「E-SOAM」。吸盤からの感触や温度も伝わる【研究紹介】
考えるだけで家事ができる脳操作ロボットシステム「NOIR」、すき焼きをつくることも!?米スタンフォード大が開発【研究紹介】
床に物が無くなるまで動く全自動お片付けロボット「TidyBot」 どこに何を収納するかは言語モデルで学習【研究紹介】
人気記事
「何の役に立つの?」と図形問題を避ける次女。学習モチベを上げた「算数のスキルツリー」整理
国産組込みOS「ITRON」が40年生き残ってきた理由を、生みの親と振り返る【TRON】
インデックスを張るだけでは足りない。数億件の名刺データを扱うSansanのSQLパフォーマンス改善