![]()
最新記事公開時にプッシュ通知します
![]()
考えるだけで家事ができる脳操作ロボットシステム「NOIR」、すき焼きをつくることも!?米スタンフォード大が開発【研究紹介】
2023年11月7日

先端テクノロジーの研究を論文ベースで記事にするWebメディア「Seamless/シームレス」を運営。最新の研究情報をX(@shiropen2)にて更新中。
米スタンフォード大学に所属する研究者らが発表した論文「NOIR: Neural Signal Operated Intelligent Robots for Everyday Activities」は、人々が脳の信号を使用してロボットに日常の動作を指示するためのシステムを提案する研究報告である。実験において、脳波を利用して、人々がロボットにどのような行動をさせるべきかを伝達し、料理や掃除などの20の家庭内タスクを実行させることに成功した。
Brain-robot interfaces (BRIs)は、脳の信号に基づいてロボットを制御する技術である。しかし、脳の信号を直接活用してロボットとコミュニケーションを取ることは、非常に挑戦的な課題である。
この研究では、「NOIR」という脳信号で操作されるロボットを提案している。これは非侵襲的脳波計(EEG)を使用したBRIシステムである。基本的なコンセプトは、人間が目的を設定し、ロボットがその目的を達成するための具体的な動作を行うというものである。例えば、「豆腐が入った皿を鍋に入れる」という指示が送られた場合、ロボットアームはその指示を解析し、適切な動作を実行する。

これらを実現するためには、人の意図を正確に読み取るための脳信号解析手法が必要となる。例えば、「マグカップを持ち上げる」という具体的な意図を、脳の信号から解析することは簡単ではない。
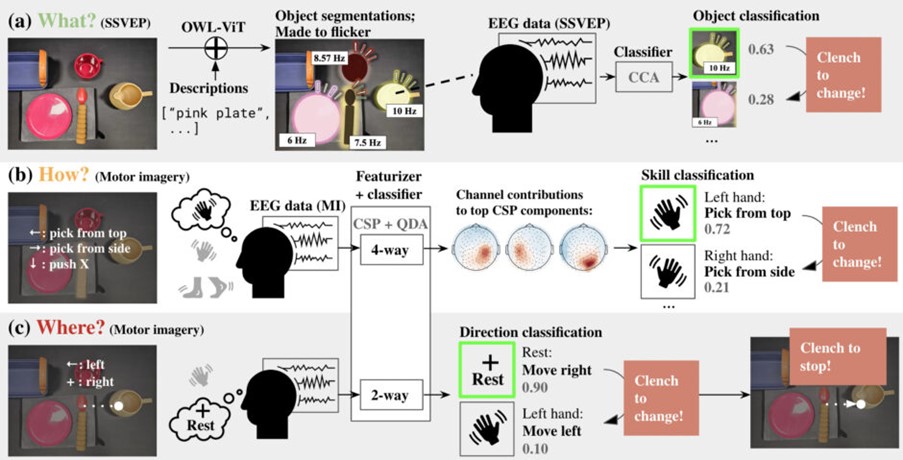
そこで、この研究の手法では、その意図を3つのステップに分けて考慮する。最初に、どのオブジェクトを操作するかの部分について、SSVEP信号を用いてCCA分類器で解析する。次に、そのオブジェクトとどのように相互作用するかという部分について、MI信号を使用しCSP+QDAアルゴリズムで解析する。最後に、どこでその相互作用を行うかという部分も、MI信号を用いて解析する。これらの解析結果をもとに、ロボットは指示通りの動作を正確に実行する。
人の意図は、特定のパラメータを伴うロボットのスキルに変換される。例えば、「Pick」というスキルは特定の位置での物体のつかみ取りを意味し、「Place」は特定の位置に物体を配置する動作を示し、「Push」は特定の位置からのある方向への押し動作を示す。このように14の基本スキルが定義されており、これらを組み合わせることで、人々はより複雑なタスクを実行することができる。
NOIRの大きな特長の一つは、少数の限られた学習サンプルからも人間の意図を予測できる能力を持つことである。これにより、より効率的な対話が可能となり(例: 人間が選択するオブジェクトやスキルの予測)、人間の意図を解析する際の時間やコストが大幅に削減される。
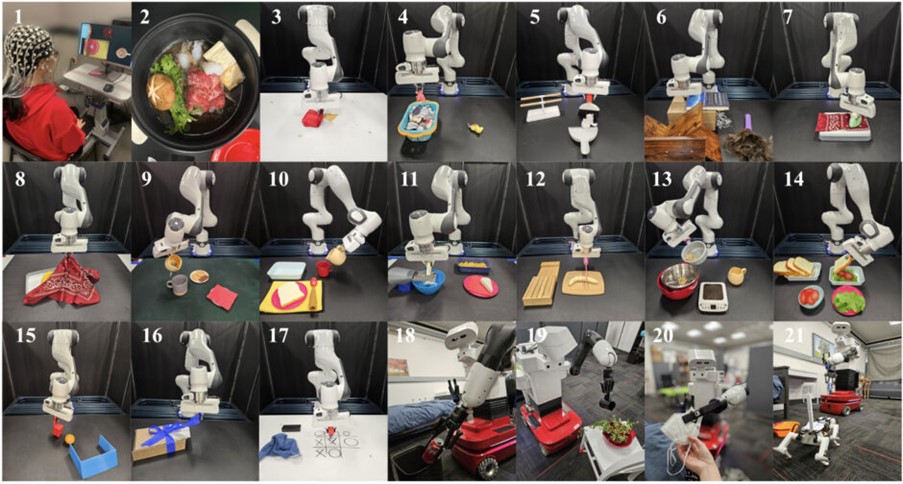
NOIRシステムを使用した実験には、3人の参加者(男性2人、女性1人)が参加した。これらの参加者は、20種類の異なる日常活動に関連するタスクに挑戦した。具体的には、食事の準備に関するタスクが8つ、この中には例えばすき焼きの調理などが含まれる。部屋の掃除や物の整理に関するタスクが4つ。植物の水やりや洋服のアイロンがけなど、個人の日常の世話やケアに関連するタスクが3つ。そして、娯楽や遊びに関連するタスクが3つであった。
これらの実験の結果、タスクを成功させるためには、平均して1.8回の試行が必要であることが明らかとなった。これは、多くの場合、1回目または2回目の試行でタスクを成功させることができると示唆している。成功した試行におけるタスク完了までの平均時間は20.3分であった。
これらの結果から、NOIRシステムは、日常的なタスクの実行において、脳の信号の解析やオブジェクトとスキルの選択に関して、高い効率と精度を持っていることが確認された。
Source and Image Credits: Ruohan Zhang, Sharon Lee, Minjune Hwang, Ayano Hiranaka, Chen Wang, Wensi Ai, Jin Jie Ryan Tan, Shreya Gupta, Yilun Hao, Gabrael Levine, Ruohan Gao, Anthony Norcia, Li Fei-Fei, Jiajun Wu. NOIR: Neural Signal Operated Intelligent Robots for Everyday Activities
関連記事

「合成脳」10万枚を公開 画像生成AIで脳のMRI画像を医療用に大量生成 欧米の研究者らで実施【研究紹介】

【LOVOT】ロボットに「生命」を宿す。開発チームに聞く「人と絆を結ぶUX」のつくりかた
脳を3Dプリンタで印刷、原料はヒトの細胞 マウスの脳に移植し正常に機能 英オックスフォード大が開発【研究紹介】
人気記事
「何の役に立つの?」と図形問題を避ける次女。学習モチベを上げた「算数のスキルツリー」整理
国産組込みOS「ITRON」が40年生き残ってきた理由を、生みの親と振り返る【TRON】
インデックスを張るだけでは足りない。数億件の名刺データを扱うSansanのSQLパフォーマンス改善