![]()
最新記事公開時にプッシュ通知します
![]()
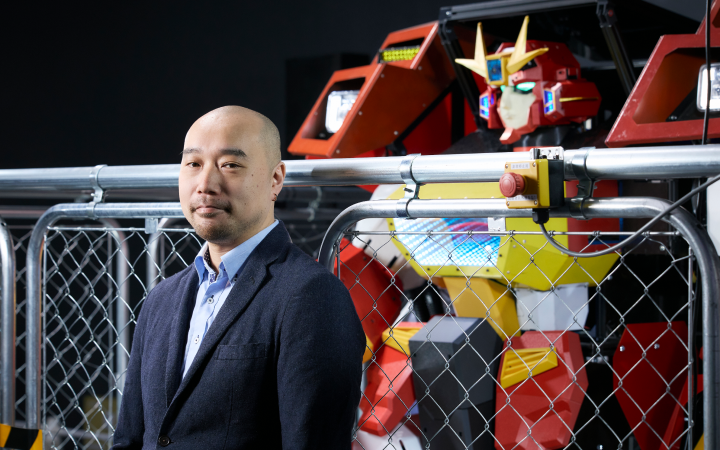
「人が乗れる変形ロボ」の実現に立ちはだかる壁|それでもロボット建造師はロマンを追う【フォーカス】
2024年6月27日


ロボット建造師
石田 賢司
1982年新潟県生まれ。金沢工業大学大学院工学研究科卒(機械工学専攻)。アニメ『トランスフォーマー』や「勇者シリーズ」に感化され、14歳より巨大変形合体ロボット建造を志す。独学で開発技術を学び、2002年から本格的に二足歩行ロボット開発に取り組む。2014年、株式会社BRAVE ROBOTICSを設立し、代表取締役に。変形ロボット開発で得たノウハウを生かし、工場用ロボットアーム部品や大型バッテリーの受託生産を行う。2023年からはロボットベンチャー「MOVeLOT」が主導する、『機動警察パトレイバー』シリーズ登場ロボットを現実に再現するプロジェクトにも開発メンバーとして携わる。
BRAVE ROBOTICS
勇者技術研究所
アニメ『トランスフォーマー』や『勇者エクスカイザー』に始まる「勇者シリーズ」では、自動車や飛行機が二足歩行ロボットへと変形する姿が描かれ、多くの子どもたちに「メカが変形し、人型になる」というロマンの灯をともしてきました。
人が搭乗できるほど巨大な、二足歩行変形ロボット。これを現実のものにしようと、20年以上さまざまなロボットをつくり続けているのが、ロボット建造師の石田賢司さんです。2018年には、ロボット制御ソフトで知られるアスラテック社や機械メーカーの三精テクノロジーズと協業し、「J-deite RIDE(ジェイダイト・ライド)」という、実際に二足歩行できる人型から、車輪走行で移動可能な車型に変形できるロボットを制作。世界的に注目を集めました。
そんな石田さんは現在、社会人サークル活動として「勇者ファイバリオン」という巨大変形ロボットの開発に取り組んでいます。独学でロボット開発に取り組み、さまざまなサイズの機体をつくり上げてきた石田さん。“人が乗れるサイズの”変形ロボをつくろうとした途端に次々に生まれる技術的なハードルとは何か。そして、理想のロボットをつくる夢が、なぜ「社会人サークル」に行き着いたのか聞きました。
かっこよくて「乗れる」ロボットをつくりたくて
――早速ですが、なぜ石田さんは変形ロボットづくりに取り組みはじめたのでしょうか。
石田:幼少のころ、『トランスフォーマー』や『勇者ロボット』シリーズなど、変形ロボットが登場する作品に憧れたのがきっかけです。「こうしたロボットたちがいつか街を歩き回るようになるんだろうな」と胸を躍らせたものの、何年経っても一向に巨大変形ロボットが実現する気配はありませんでした。
中学2年生だった1994年、ふと「待っていても出ないなら、自分でロボットをつくってみようかな」と思い、その道へと進もうと決めたんです。

――アニメで見たようなロボットを現実につくるために、石田さんは何から始めたのですか?
石田:そもそもロボットとは何か、どうしたらロボットがつくれるか、という基礎的な勉強からはじめました。
ロボットづくりのスタートは中高生の頃で、当時は完全に独学でした。本を買い、見よう見まねでマイコンを使ったプログラミングや電子工作をしてみながら、機械が動く仕組みを学んでいました。大学では地元に近く、かつ「ロボティクス学科」を設置していた金沢工業大を選びました。
卒業後は、車に変形するロボット開発に必要な技術を学ぶために、自動車関係の仕事をしていました。そこでの経験を生かしつつ、個人ではさまざまな小型変形ロボットを2002年から試作。「J-deite RIDE」というさらに本格的で巨大なロボットをつくるにあたって、活動を法人化し、2014年にBRAVE ROBOTICSを設立したのです。
企業から依頼を受けての受託制作をすることもありますが、基本的にロボットづくりは「趣味」です。昔、「ROBO-ONE」※1に出場したときにつくったロボットや、いまつくっている「ファイバリオン」なんかは趣味100%ですね。
(※1)ROBO-ONE:市販や自作の二足歩行ロボットを使った、格闘を中心としたロボット競技大会。
――理想としては、どんなロボットをつくりたいと考えているのですか?
石田:まず、通常の自動車と同じように、「人が乗って公道を走れること」がマストです。車両や飛行機が人型へと変形するアニメを見て育った自分にとって「ロボットとは、乗り物である」との信念があるからです。
次に、数秒で変形できること。数十秒かけてゆっくりとトランスフォームするようでは、アニメで見たロボット像からはほど遠いですから。
あと、プロポーションですよね。足は長く、腰は細めで、メリハリのついたボディを持った、アニメのようにクールな見た目のロボットをつくりたいです。
2018年に公開した「J-Deite RIDE」は、確かに変形ロボットとして完成はしましたが、この「理想」にはまだ及んでいない部分があると感じました。反省点をふまえて、同年から取り組んでいるのが、現在、社会人サークル「勇者技術研究所」で制作中の「ファイバリオン」です。

爆発的に増す重さをどうするか
――巨大変形ロボットをつくるうえで、最も大変なことは何ですか?
石田:これまで全長30センチから、約4メートルのJ-deite RIDEまで、大小さまざまな変形ロボットを手がけてきました。やはり、おもちゃとしての小さい変形ロボと比べて、人が乗れるほど巨大で、なおかつ自由自在に変形できるロボットをつくろうとすると、難易度は飛躍的に上がるんですよ。
一言でいえば、パーツが大きくなるだけ。でも巨大化させると、その重量は爆発的に増えていきます。部品の全長が2倍になると、高さ×横幅×奥行きにより、体積は8倍にもなりますから、形状や素材密度が同じなら重さも8倍です。
重量という課題に伴う苦労はやはり、多いです。たとえば、各関節を動かすアクチュエーター、つまりはモーターをどうするか。30cmくらいの小型ロボットなら、ホビーや研究用ロボット用に既製品が市販されているので、これらをそのまま使えます。でもさすがに、人を乗せて歩けるような巨大ロボット用のモーターは、市販どころか、そもそも誰もつくっていません。
J-deite RIDEの場合は、自動車工場で車体などを持ち上げる産業用ロボットアームのモーターを購入し、使っていました。一応動かすのには成功したのですが、やはりモーター自体がめちゃくちゃ重くて。結果、J-deite RIDEは総重量が2トン弱になり、変形や歩行の動作スピードも遅くなってしまっていました。
さらに厄介なことに、モーターを制御する「ロボットコントローラ」※2を機体に乗せると、歩行時に発生する衝撃により故障しやすいんです。
(※2)ロボットコントローラ:正確なアームの動きを実現するため各モーターの回転数や位置を計算し、リアルタイムで調整する専用端末。

石田:でも、産業用ロボットアームの設計思想を考えると、このモーターの重さも、コントローラが故障に弱いのも、当たり前なんですよね。元々の用途である自動車工場での高負荷な運用に耐えられるよう、耐久性を最優先に重視しているし、足場を固定して使うから、別に重くてもいい。同様に、ロボットコントローラも床に設置して使うのが前提なので、衝撃への耐久性なんてないんです。
このように、産業用途を想定した既製品を、そのまま変形ロボットに採用すると、都合の悪い部分が出てきてしまいます。でも、ゼロから全てつくると膨大なコストと時間がかかる。いかにバランスのとれた解決策を見つけられるかが大変悩まされる部分ですね。

――ファイバリオンのモーターでは、どうやってこのジレンマに対処しているのでしょう。
石田:小型軽量ながらトルクの大きいモーターを用意するため、マルチコプターなどに使われている市販のモーターをベースにしつつ、大幅なチューンアップを施しました。モーターの性質は目的に応じて「トルクが強いもの」「回転数が速いもの」などさまざまな種類があるのですが、我々は巨体を動かすためにとにかく、トルクの強さだけに特化するよう改造を重ねました。
ファイバリオンの開発は2018年に開始したのですが、最初の3~4年はほとんど、モーターづくりにのみ費やしたものです。その甲斐あって、軽量さと出力の高さを両立したいいモーターができたと思います。スペック詳細は非公表ですが、モーターの力をわかりやすくいうと、最大出力の5%の力でも、片腕で20キログラムの砂袋を持ち上げられます。
また、モーターだけでなく、とにかく総重量を減らすために、ロボットの外装や内装も、デザインや機能性の観点で不要な厚みは極力削り、軽量化を図っています。とはいえ、厚みを削りすぎて軽くし過ぎると強度が保てませんし、重くすると身動きがとれないので、このバランス調整も難しい部分です。
――やはり、「重量」という課題でかなり苦戦するんですね。ソフトウェアの面ではどんな難しさがありますか。
石田:人型ロボットを動かす上での定番フレームワークやシステムは現状、存在しないんです。ほとんどの場合はイチからつくらないといけないので、開発ハードルが極めて高い。
ロボット制御のための汎用的な枠組みを目指している動きとして、オープンソースプロジェクトのROS(Robot Operating System)というのがありますが、このROSを使えば人型ロボットが簡単に動かせる、なんてことは全然ないんです。ROSを通してロボットを動かすには大前提としてC++やPythonでプログラムをつくる必要があるため、相応の知識が必要ですし、物理的世界で動くものをリアルタイムで制御するには高度なスレッド管理ができないといけない。
特に、大型になるとどうしてもハードの仕様が特殊になってくるので、ROSで賄える動作処理パッケージの範囲を超えてしまうんですよね。
ロボット魂を持ったまま大きくなった人たちの本気
――ファイバリオンを動かすソフトウェアは、どのように用意していますか?
石田:開発メンバーの「みっちー」こと尾路紘一さんが、ファイバリオン専用のソフトウェアをイチからつくっています。
彼とは2005年に第8回の「ROBO-ONE」で同じ大会に出場する競争相手として出会い、その後も何回か同大会で顔を合わせていて。ファイバリオンをつくろうと思ってソフトウェア開発者を探していたときに私から声をかけました。
彼の本業は、自身が経営する医療システムベンダーでのソフトウェア開発です。機械の制御設計にも知見を持っていて、ファイバリオンの開発にもその知見を存分に生かしてくれています。

――ちなみに、ファイバリオンのデザインは、石田さんが描いたのですか?
石田:いえ、『トランスフォーマー』のおもちゃデザインや「ICOMAタタメルバイク」で知られる、生駒タカミツさんに開発初期からメンバーとして加わってもらい、大変かっこいいものを描き下ろしてもらっています。
生駒さんとは、10年以上前、彼がタカラトミーで『トランスフォーマー』を手がけていたころに仕事で知り合いました。生駒さんもロボット好きなのですが、互いに理想とするロボットデザインの方向性が近かったので、今回、私からお声がけしました。
さまざまなバックグラウンドを持った大人たちが、「変形ロボットが好き」という共通点だけで集まって開発に取り組んでいるんです。

――ファイバリオンの開発を、事業ではなく、社会人サークルとしてやっているのはなぜでしょう?
石田:もともとは事業化を目指して、仕事として進めるつもりでした。でもデザイナーの生駒さんから、「遊びとしてゆるく長くやったほうが、プロダクトとしてなにか膨らむんじゃない?」と言われて。
たしかに、納期や「利益を出さないといけない」というプレッシャーもなく、好き勝手に試作を重ねられる環境の方が、結果的にはより実用的なものが生まれやすいかもしれない。こうした流れで、採算度外視の社会人サークルという形でひとまずはやっています。

――社会人サークルという形にしたことで、開発上のメリットはありますか?
石田:仕事ではないので、アジャイルどころではない、極めて柔軟な開発手段がとれることです。
仕事としてロボット開発をするときには、かっちりと要求仕様を固め、構造と開発方針を決めた上で、ウォーターフォール的に取り組みます。そうじゃないと、うまく進まない。
でも、ファイバリオンはあくまで趣味だから、「実装してみたらうまくいかなかった」なんてことがあっても、「まあもう一回やればいっか」と割り切れるんです。
だから、あまりリソースや影響を深く考慮せずに、「こういう新しいモーターを使いたいから、制御系をソフトウェア側で対応してくれない?」なんて思いつきを突然、ソフトウェアの設計を担当するみっちーさんに投げることもあります。
逆に私がメカニクス部分をある程度つくり込んだ後に、みっちーさんから「姿勢制御の都合上、やっぱりここにセンサーを追加してほしいんだけど」と言われて、造形的にそのままでは追加が不可能で「あ~!つくり直し!」みたいなこともあります(笑)。サークルらしく、わいわいのんびりとつくってます。

巨大変形ロボが街中を走る未来はすぐそこに?
――現在、ファイバリオンの完成進捗はどれくらいでしょうか?
石田:約6年間かけて、まだ35%という所感です。ですが、ようやくゴールが見えてきました。内部構造を含めて、上半身はすでに完成しました。腕や手は結構キビキビと動きますよ。
【部品協力スポンサー紹介】
頭部やハンドの動作部分、また操縦装置などに使用している小型アクチュエータについて、
株式会社ロボティズ日本支社様に協力して頂く事になりました!https://t.co/8cuEeU3LlE
ハンドには片手に17個のXL-330を使用しています。#ファイバリオン pic.twitter.com/tDq6NIT7I3— 勇者技術研究所 (@firebarion) May 3, 2024
▲ハンド部分はキビキビと動きます。
石田:現在は、下半身のメカ構造をつくりはじめているところで、先日は、東京・日本未来科学館で開催の「SuShi Tech2024」にも出展しました。当初から目指している「人型で歩き、車両に変形して道路を走る」というコンセプトは、2025年初頭での実現を目標にがんばっています。
――ファイバリオンが完成したら、販売などもする予定なのでしょうか?
石田:もちろん、商業化は視野にいれています。販売形態は未定ですし、おそらくデザインも変わるとは思いますが。100Vの電源で充電しバッテリー駆動で走れて、一般的な駐車場にも置いておける仕様にする予定です。また、ミニカー規格として行政への申請も行い、普通自動車免許で運転できるようにします。
憧れの変形ロボットを操縦でき、しかも車として公道を走ることができるというのは、製品としてかなりの訴求力になるのではないかなと思っています。

石田:その先については、さらなる巨大化にも挑戦していきたい。それに、夢物語に聞こえるでしょうが、ロボットといえばやっぱり合体も考えなくちゃいけませんよね。最終的にはあのころ見たアニメのように、空飛ぶ変形ロボもつくりたい。いろいろな構想があるので、ぜひ楽しみにしていてください。
取材・執筆:古屋江美子
編集:田村今人・光松瞳
関連記事

“アニサキス殺し”パルスパワーは「器用貧乏」な技術だった 「電気エネルギー界のドラえもん」が拓く未来【フォーカス】
「もっと読みやすくできるはず」。白源、Bizin Gothic作者が日本語入りプログラミングフォントを手がけ続ける理由【フォーカス】

趣味でつくった2Dゲームエンジンが導いた「幸」あるキャリア。己の欲求に従い続けてきた「Ebitengine」開発者に迫る
人気記事

【3/26(木)オンライン開催!】Rust いまのアーキテクチャにどこから入れる? ~ yukiさん、kenkooooさんが部分導入の“最適解”を語る夜 ~

世界屈指の「ランサムウェアに金を払わない国」なはずの日本にサイバー攻撃が増えている理由【上原哲太郎&増田幸美】
「何の役に立つの?」と図形問題を避ける次女。学習モチベを上げた「算数のスキルツリー」整理